ロボットタウンプロジェクト
分散センサシステムとマネジメントシステムによる人間とロボットの共生を目指した「ロボットタウンプロジェクト」を推進しています. ロボットの活動の場が工場内から屋外環境へ移るにつれて,ロボットが処理すべき情報量は飛躍的に増加すると見込まれます. この膨大な情報処理を,センサによる情報獲得から認識,判断,動作計画,そして実行まで全てロボット単体で行わせるのは, ロボットの可搬計算機の処理能力から非現実的です.そこで,ロボットの代わりに,環境側が情報を取得,管理し,ロボットに 必要なタイミングで必要な情報を提供できれば, ロボットは環境計測に費やす資源を他の必要な処理に回すことができます. これにより超高機能なロボットでなくとも,人間と共生し安全に作業を実行できるロボットシステムが構築できます. この考え方を「環境情報構造化」あるいは「環境の知能化」と呼びます.我々もこの考えに立ち,1)環境に固定したレーザ センサやカメラによってロボットに必要な環境情報の一つである人間などの移動体を追跡し,位置を計測するシステム, 2)分散カメラにより人間の動作を計測するシステムなどを開発しています.
| 複数移動体の追跡 | 家屋内での人間追跡 |
| 1組のパーティクルフィルタで11人を追跡 |
| 分散カメラによる人間動作計測 | 分散カメラによる人間動作計測 |
発表論文
- Kouji Murakami, Tokuo Tsuji, Tsutomu Hasegawa, Ryo Kurazume, Object tracking system by integrating multi-sensored data, The 42nd Annual Conference of IEEE Industrial Electronics Society (IECON 2016), Firenze, Italy, 2016.10.24-27, 2016
- Yoonseok Pyo, Tsutomu Hasegawa, Masahide Tanaka, Tokuo Tsuji, Ken'ichi Morooka and Ryo Kurazume, Measurement and Estimation of Indoor Human Behavior of Everyday Life Based on Floor Sensing with Minimal Invasion of Privacy, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.2170-2176, Shenzhen, 2013
- 長谷川 勉, ピョユンソク, 田中 真英, 辻 徳生, 諸岡 健一, 倉爪 亮, 床上センシングシステムを用いた生活環境における移動物体の位置計測と居住者の行動推定, 日本ロボット学会誌, Vol.31, No.8, pp.769-779, 2013
- Oscar Martinez Mozos, Tokuo Tsuji, Hyunuk Chae, Shunya Kuwahata, Tsutomu Hasegawa, Ken'ichi Morooka, Ryo Kurazume, The Intelligent Room for Elderly Care, The fifth International Workconference on the Interplay between Natural and Artificial Computation (IWINAC2013), June 10-14 2013, Mallorca Spain, 2013
- Ken'ichi Morooka, Shuji Sonoki, Ryo Kurazume, Tsutomu Hasegawa, A Method for Estimating Patient Specific Parameters for Simulation of Tissue Deformation by Finite, The fifth International Workconference on the Interplay between Natural and Artificial Computation (IWINAC2013), June 10-14 2013, Mallorca Spain, 2013
- Ryo Kurazume, Yumi Iwashita, Koji Murakami, and Tsutomu Hasegawa, Introduction to the Robot Town Project and 3-D Co-operative Geometrical Modeling Using Multiple Robots, 15th International Symposium on Robotics Research (ISRR 2011), Flagstaff, August 28-31, 2011.
- Kouji Murakami, Tsutomu Hasegawa, Yasunobu Nohara, Byong Won Ahn, and Ryo Kurazume, Position Tracking System for Commodities in an Indoor Environment, Proc. of IEEE International Conference on Sensors, pp.1879-1882, USA, Nov. 2010
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Detecting Repeated Motion Patterns using Partly Locality Sensitive Hashing, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS10), pp.1353-1358, Taipei, October 18-22, 2010
- Kouji Murakami, Tsutomu Hasegawa, Yasunobu Nohara, Byong-won Ahn, Ryo Kurazume, Position Tracking System for Commodities in a Daily Life Environment, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS10), pp.3712-3718, Taipei, October 18-22, 2010
- Oscar Martinez Mozos, Ryo Kurazume, Tsutomu Hasegawa, Multi-Part People Detection Using 2D Range Data, International Journal of Social Robotics, Vol.2 , No.1 , pp.31-40, (2010.3)
- 倉爪 亮, 山田 弘幸, 曽我部 光司, 村上 剛司, 岩下 友美, 長谷川 勉, SIR/MCMCパーティクルフィルタを用いた分散カメラとレーザによる複数移動体の同時追跡, 日本ロボット学会誌, Vol.27, No.1, pp.65-76, (2010.1)
- Yumi Iwashita, Masaki Saito, Ryo Kurazume, Tsutomu Hasegawa, Motion Tracking in Daily Environment Using Distributed Image and Laser Sensors, The First International Workshop on Human Behavior Sensing, Kassel, Germany, June 15, 2010.
- Yumi Iwashita, Ryo Kurazume, Takamitsu Mori, Masaki Saito and Tsutomu Hasegawa, Model-based motion tracking system using distributed network cameras, in Proc. IEEE International Conference on Robotics and Automation, pp.3020-3025, Anchorage, May 3-8, 2010.
- Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume, and Yoshihiko Kimuro, Supporting Robotic Activities in Informationally Structured Environment with Distributed Sensors and RFID Tags, Journal of Robotics and Mechatronics, Vol.21, No.4, pp.453-459, (2009.8)
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Fast Repetitious Motion Pattern Detection Method via Dynamic Programming using Motion Density, in Proc. IEEE International Conference on Robotics and Automation, pp.1743-1749, May 12-17, 2009.
- 〆野敦稔, 内田誠一, 倉爪 亮, 谷口倫一郎, 長谷川勉, 自己発信情報の組み込みによる移動体の分離追跡, 電気学会論文誌(C), vol.129, no.5, pp.977-984, (2009.5).
- 横矢 剛, 長谷川 勉, 倉爪 亮, 村上 剛司, 移動ロボットによる統一座標系での広域分散カメラキャリブレーション, 電子情報通信学会誌, Vol.J92-D, No.1, pp.123-130, (2009.1)
- 村上 剛司, 長谷川 勉, 木室 義彦, 千田 陽介, 家永 貴史, 有田 大作, 倉爪 亮, 情報構造化環境における情報管理の一手法, 日本ロボット学会誌, Vol.26, No.2, pp.192-199, (2008.2)
- Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume and Yoshihiko Kimuro, A Structured Environment with Sensor Networks for Intelligent Robots, Proc. of IEEE Int. Conf. on Sensors, pp.705-708, Lecce, Italy, Oct. 2008
- Tsuyoshi Yokoya, Tsutomu Hasegawa, Ryo Kurazume, and Kouji Murakami, Calibration of Distributed Vision Network in Unified Coordinate System by Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.1412-1417, April 2008.
- Kazuya Matsuo, Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume, A Decision Method for the Placement of Tactile Sensors for Manipulation Task Recognition, in Proc. IEEE International Conference on Robotics and Automation, pp.1641-1646, April 2008.
- Tsuyoshi Yokoya, Tsutomu Hasegawa, and Ryo Kurazume, Calibration of Widely Distributed Vision Cameras by Mobile Robots with Cooperative Positioning, 17th IFAC World Congress, pp.-, July 2008.
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Learning Meaningful Interactions from Repetitious Motion Patterns, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3350-3355, Nice, Sep. 2008
- Ryo Kurazume, Hiroyuki Yamada, Kouji Murakami, Yumi Iwashita, and Tsutomu Hasegawa, Target Tracking Using SIR and MCMC Particle Filters by Multiple Cameras and Laser Range Finders, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3838-3844, Nice, Sep. 2008
- Kazuya Matsuo, Kouji Murakami, Tsutomu Hasegawa, and Ryo Kurazume, Recognition of Manipulation Sequences by Human Hand Based on Support Vector Machine, The 33rd Annual Conference of the IEEE Industrial Electronics Society (IECON'07), pp. 2801-2806, Taipei, Taiwan, November. 2007
- Tsutomu Hasegawa, Kouji Murakami, Ryo Kurazume, Yosuke Senta, Yoshihiko Kimuro, Takafumi Ienaga, Robot Town Project: Sensory Data Management and Interaction with Robot of Intelligent Environment for Daily Life, 2007 International Conference on Ubiquitous Robots and Ambient Intelligence (URAI07), 2007.
- 辻 徳生, 日下 和也, 長谷川 勉, 倉爪 亮, 諸岡 健一, 履物上加速度センサと床上レーザレンジファインダを用いた複数人物の追跡, 日本機械学会ロボティクスメカトロニクス講演会, 1P2-H01, 2014.5.26
- 表 允晳, 永田 晃洋, 中島 洸平, 桑畑 舜也, 辻 徳生, 諸岡 健一, 倉爪 亮, 長谷川勉, 分散センサを用いた室内状況推定に基づくサービス自動実行アーキテクチャ, 日本機械学会ロボティクスメカトロニクス講演会, 1P2-H02, 2014.5.26
- Yoonseok Pyo, Tokuo Tsuji, Shunya Kuwahata, Tsutomu Hasegawa, Ken’ichi Morooka, Ryo Kurazume, Informationally Structured Environment for Elderly Care House, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-O-02, Kyoto, 2012.10.31-11.1
- 永田 晃洋, 長谷川 勉, 表 允晳, 辻 徳生, 諸岡 健一, 倉爪 亮, 生活支援のための環境分散センサ情報統合アーキテクチャ, 第31回日本ロボット学会学術講演会, 1I1-04, 2013.9.4
- 桑畑 舜也, 長谷川 勉, 諸岡 健一, 倉爪 亮, 辻 徳生, 情報構造化環境における家具上物品検出のための移動ロボットによる視覚記憶照合と変化検出, 第31回日本ロボット学会学術講演会, 3I1-04, 2013.9.6
- 橋口 優香, 長谷川 勉, 表 允晳, 辻 徳生, 諸岡 健一, 倉爪 亮, パーソナル清掃ロボットによる室内落下日用品の収集, 日本機械学会ロボティクスメカトロニクス講演会2013, 2A2-Q08, 2013.5.22~25
- 蔡 現旭,桑畑舜也,Oscar Martinez Mozos,長谷川勉,辻 徳生,諸岡健一,倉爪 亮, 情報構造化環境における日用品の追跡 -3次元ポイントクラウドを用いた変化箇所の検出と物体識別-, 第18回ロボティクスシンポジア講演予稿集, 1C1, pp. 69-75, 2013.3.14-15, 2013
- 長谷川勉,田中真英,表 允晳,辻 徳生,諸岡健一,倉爪 亮, 床上センシングシステムと室内生活行動モデルにもとづく居住者の行動推定, 第18回ロボティクスシンポジア講演予稿集, 3D2, pp. 330-336, 2013.3.14-15, 2013
- 表 允晳, 田中 真英, 長谷川 勉, 辻 徳生, 諸岡 健一, 倉爪 亮, レーザレンジファインダの反射強度を利用した物体及びロボットの位置計測, 第13回 計測自動制御学会システムインテグレーション部門講演会, 1H4-1 , 2012.12.18
- 田中 真英, 表 允晳, 辻 徳生, 長谷川 勉, 諸岡 健一, 倉爪 亮, レーザレンジファインダを用いた床上センシグによる室内生活行動の計測, 第13回 計測自動制御学会システムインテグレーション部門講演会, 1H4-2, 2012.12.18
- 辻 徳生, 表 允晳, 曾 昀, 永田 晃洋, 長谷川 勉, 倉爪 亮, 諸岡 健一, 村上 剛司, TMS クラウド: ロボットタウンマネジメントのためのスケーラブルな分散処理システム, 第13回 計測自動制御学会システムインテグレーション部門講演会, 1H4-7, 2012.12.18
- 田中 堅三, 倉爪 亮, 辻 徳生, 長谷川 勉, タウンマネジメントシステムによる地図情報と連携した物品取得サービスの実現, 第13回 計測自動制御学会システムインテグレーション部門講演会, 1H4-8, 2012.12.18
- 桑畑 舜也, 長谷川 勉, 蔡 現旭, 諸岡 健一, 倉爪 亮, 情報構造化環境における日用品の追跡, 第30回日本ロボット学会学術講演会, 2J2-7, 2012.9.18
- 表 允皙, 長谷川 勉, 曾 昀, 辻 徳生, 諸岡 健一, 倉爪 亮, レーザレンジファインダによる反射強度と位置計測を用いた床上センシングシステム, 第30回日本ロボット学会学術講演会, 2H2-2, 2012.9.18
- 森 達則, 田中 真英, 辻 徳生, 村上 剛司, 長谷川 勉, 諸岡 健一, 倉爪 亮, 加速度センサと床上レーザレンジファインダを用いた複数移動物体の位置同定, 日本機械学会ロボティクスメカトロニクス講演会2012, 1A1-R04, (2012.5.27~29)
- 田中 堅三, 辻 徳生, 倉爪 亮, 長谷川 勉, タウンマネジメントシステムによるサービスロボットのための地図情報管理, 日本機械学会ロボティクスメカトロニクス講演会2012, 1A1-R03, (2012.5.27~29)
- 長谷川 勉, 蔡 現旭, Oscar Martinez Mozos, 辻 徳生, 諸岡 健一, 倉爪 亮, 情報構造化環境における日用品の追跡, 第29回日本ロボット学会学術講演会, 1O2-6, 2011.9.7
- 森 達則, 田中 真英, 辻 徳生, 長谷川 勉, 諸岡 健一, 倉爪 亮, 加速度センサと床上レーザレンジファインダを用いた移動物体の位置同定, 第29回日本ロボット学会学術講演会, 3N2-1, 2011.9.9
- 表 允皙, 長谷川 勉, 辻 徳生, 諸岡 健一, 倉爪 亮, ジェスチャによる移動ロボットへの動作目標指示と誤差修正, 第29回日本ロボット学会学術講演会, 3O1-7, 2011.9.9
- 垂水 信二, 岩下 友美, 倉爪 亮, 統計的人体モデルを用いた個体適応型モデルベースド・モーションキャプチャの開発, 画像の認識理解シンポジウム (MIRU2011), IS3-48, 2011.7.22
- 村上 剛司, 松尾 一矢, 関屋 翔, 長谷川 勉, 倉爪 亮, 環境固定センサと移動ロボット搭載センサを用いた物品追跡, 日本機械学会ロボティクスメカトロニクス講演会, 2P1-J07, (2011.5.28)
- 長谷川 勉, 村上 剛司, 田中 真英, 倉爪 亮, レーザレンジファインダと鏡を用いた床上センサによる人の歩行追跡と物体検出, 日本機械学会ロボティクスメカトロニクス講演会, 2P1-Q07, (2011.5.28)
- 曽我部 光司, 倉爪 亮, 岩下 友美, 長谷川 勉, JPDAF とカラーヒストグラムを用いた複数センサによる移動体追跡, 第11回計測自動制御学会システムインテグレーション部門講演会, 1I3-2, 2010.12.23.
- 関屋 翔, 村上 剛司, 松尾 一矢, 長谷川 勉, 倉爪 亮, 環境配置センサ群と作業ロボットによる日用物品の追跡, 第11回計測自動制御学会システムインテグレーション部門講演会, 2I3-6, 2010.12.24.
- Kouji Murakami, Kousuke Shigematsu, Tsutomu Hasegawa, Ryo Kurazume, Position Tracking System of Everyday Objects in a Care Facility, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, OS6-4, 2010.10
- 村上剛司, 松尾一矢, 野原康伸, 長谷川勉, 倉爪亮, 知的収納庫とFloor Sensing Systemを用いた物品追跡システム, 第28回日本ロボット学会学術講演会講演予稿集, 3P1-7, 2010.9
- 垂水 信二, 岩下 友美, 倉爪 亮, モデルベースドモーションキャプチャのための個体適応人体モデルの構築, 日本機械学会ロボティクスメカトロニクス講演会, 2A1-A24, (2010.6)
- 村上 剛司, 重松 康祐, 野原 康伸, 長谷川 勉, 倉爪 亮, Ahn Byong-won, 人間・ロボット共生環境における日用品追跡システム, 日本機械学会ロボティクスメカトロニクス講演会, 2A1-C09, (2010.6)
- Koji Sokabe, Ryo Kurazume, Hiroyuki Yamada, Kouji Murakami, Yumi Iwashita, and Tsutomu Hasegawa, Tracking Pedestrians by Color Histograms and Range Data, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps1-9, (2009 10)
- Shinji Tarumi, Yumi Iwashita, Ryo Kurazume, and Makoto Hashizume, Development of Pseudo 3D Visualization System for Endoscopic Ultrasonography, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-5, (2009 10)
- 重松康祐, 村上剛司, 野原康伸, 長谷川勉, 倉爪亮, 施設内生活支援ロボット知能の研究開発-知的冷蔵庫と環境情報管理サーバを用いたロボットへの物品情報提供システムの構築-, 日本ロボット学会第27回学術講演会, 1D2-04, 2009.9
- 八田啓希, 野原康伸, 長谷川勉, 倉爪亮, 施設内生活支援ロボット知能の研究開発―観測不能領域を考慮した施設内人物追跡システム―, 日本ロボット学会第27回学術講演会, 1D2-05, 2009.9
- 曽我部光司, 倉爪亮, 長谷川勉, カラーヒストグラムを用いたレーザ・カメラによる複数移動体追跡, 日本ロボット学会第27回学術講演会, 1R3-03, 2009.9
- 斉藤暢記, 倉爪亮, 岩下友美, 村上剛司, 長谷川勉, 分散カメラシステムによる実時間人間動作計測, 平成21年度第62回電気関連学会九州支部連合大会, 09-2P-11, 2009.9
- 末次孝明, 倉爪亮, 岩下友美, 多様なセンサを統合処理する5感センサポッドの開発, 平成21年度第62回電気関連学会九州支部連合大会, 09-2P-10, 2009.9
- 横矢 剛, 長谷川 勉, 倉爪 亮, LRFを搭載した群ロボットによる未知環境三次元地図の自動作成, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-E13, (2009.5)
- 安陪 隆史, 長谷川 勉, 村上 剛司, 倉爪 亮, 環境固定カメラと複数移動ロボットによる協調位置姿勢計測,第9回計測自動制御学会システムインテグレーション部門講演会, 1B4-4, 2008.12.05
- 倉爪 亮,機械を賢くする方法・ロボットを賢くする方法,日本機械学会IIP部門(知能・情報・精密機器部門),2008.11.10.
- Ryo Kurazume, Kouji Murakami, Yumi Iwashita and Tsutomu Hasegawa, Target Tracking Using Particle Filters by Multiple Sensor Pods, Proc. 4th Joint Workshop on Machine Perception and Robotics (PKMPR2008), pp.-, (2008 11)
- 毛利 啓太, 長谷川 勉, 倉爪 亮, 環境固定センサとロボット搭載センサによる協調センシング, 日本機械学会ロボティクスメカトロニクス講演会, 2P1-H10, (2008.6)
- 長谷川 勉, 倉爪 亮, 村上 剛司, 木室 義彦, ロボットタウン:日常生活環境の情報構造化?プラットフォームの実装とロボット作業への適用?, 電子情報通信学会ネットワークロボット時限研究会, 信学技報, (2008.3)
- 山田 弘幸, 倉爪 亮, 村上 剛司, 長谷川 勉, SIR/MCMCパーティクルフィルタを用いたカメラとレーザレンジファインダによる複数移動体の同時追跡, 第13回ロボティクスシンポジア講演会予稿集, (2008.3).
- 森 敬充, 倉爪 亮, 長谷川 勉, 村上 剛司, 分散ビジョンシステムを用いたモデルベースドモーショントラッキング, 第13回ロボティクスシンポジア講演会予稿集, (2008.3).
- 柴田 光, 長谷川 勉, 倉爪 亮, 照度変化のある屋内環境における実時間人物追跡, 第8回計測自動制御学会システムインテグレーション部門講演会講演予稿集, 3A3-3, (2007.12)
- 横矢 剛, 長谷川勉, 倉爪 亮, 村上 剛司, 広域分散カメラのキャリブレーションを目的とした移動ロボット群の経路計画, 第8回計測自動制御学会システムインテグレーション部門講演会講演予稿集, 2M2-4, (2007.12)
- 山田 弘幸,倉爪 亮,村上 剛司,長谷川勉,SIR/MCMCパーティクルフィルタを用いたカメラ・レーザセンサによる移動体追跡,第25回日本ロボット学会学術講演会講演予稿集,(2007.9)
- 森 敬充,倉爪 亮,村上 剛司,長谷川勉,複数カメラによるリアルタイム・モデルベースドモーショントラッキング,第25回日本ロボット学会学術講演会講演予稿集,(2007.9)
- 戸畑 享大,倉爪 亮,村上 剛司,長谷川勉,群ロボットを用いた大規模3次元環境計測システム,第25回日本ロボット学会学術講演会講演予稿集,(2007.9)
- 野辺 大悟,長谷川勉,村上剛司,倉爪亮,ロボットの行動支援を目的とした分散ビジョンシステムによる移動体計測,第25回日本ロボット学会学術講演会講演予稿集,(2007.9)
- 山田 弘幸,倉爪 亮,村上 剛司,長谷川 勉,SIR/MCMCパーティクルフィルタを用いた複数カメラとレーザレンジファインダによる移動体のトラッキング,画像の認識理解シンポジウム (MIRU2007), IS-5-19, (2007 7)
- 森 敬充,倉爪 亮,長谷川 勉,村上 剛司,複数カメラによるリアルタイム・モデルベースドモーショントラッキング,日本機械学会ロボティクスメカトロニクス講演会, 2P1-D05, (2007.5)
- 山田 弘幸,倉爪 亮,村上 剛司,長谷川 勉,LevelSetTrackingを用いた複数レーザレンジファインダとカメラによる歩行者のトラッキング,第12回ロボティクスシンポジア講演会予稿集,289, (2007.3).
- 山田 弘幸,倉爪 亮,村上 剛司,長谷川 勉,ロボットタウンの実証的研究 -Level Set Trackingと複数レーザレンジファインダを用いた複数対象の同時追跡-,第24回日本ロボット学会学術講演会講演予稿集,,2N16,(2006.9)
ROS-TMS (ROS - Town Management System)
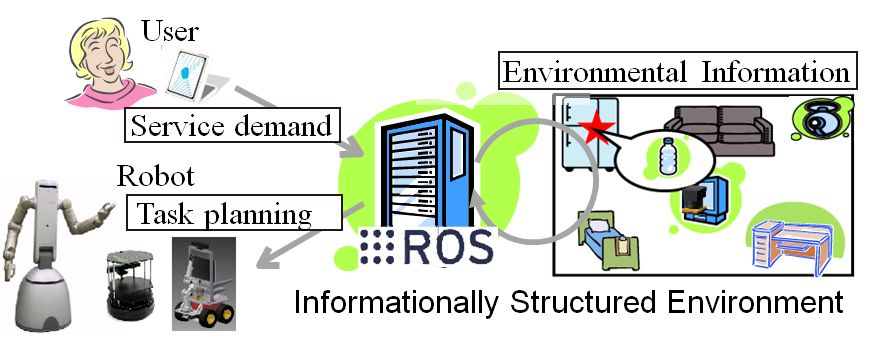
超高齢社会において,医療・介護現場での労働力不足は大きな社会問題であり,その解決策の一つとして,生活支援を行うサービスロボットの開発が期待されています.しかし,サービスロボットの作業環境は多様で動的に変化する ため,ロボットに搭載したセンサのみで環境を把握することは困難です.そこで,2005年から,環境側に 固定センサを分散配置し,各センサから得られるデータをネットワークを介して取得・分析・保持するためのシステム (Town Management System,TMS)を構築してきました.さらに2012年からは,TMSの機能拡張性やノード間通信 の柔軟性を高めるために,オープンソースのミドルウェアROSをベースにしたTMS「ROS-TMS (ROS - Town Management System)」の開発を開始しています。
 ROS-TMS概念図
ROS-TMS概念図 |
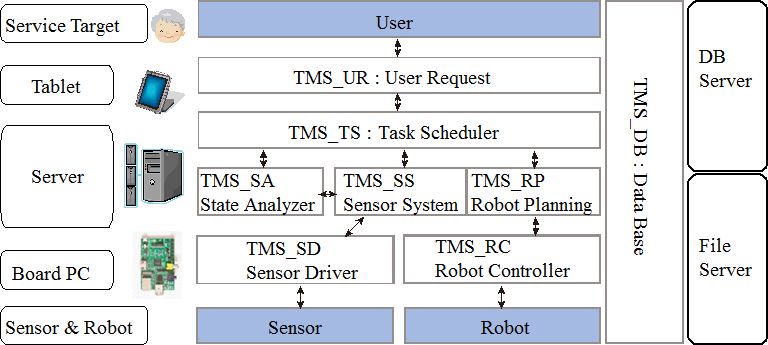 ROS-TMSアーキテクチャ
ROS-TMSアーキテクチャ |
| 知的冷蔵庫 | 知的収納庫 |
| スマートグラスを用いた物品探索 | スマートフォンを用いた物品探索 |
| 没入感VRインターフェース | Velodyneセンサ搭載サービスロボット |
| ロボットによる物品取り寄せ(シミュレーション) | ロボットによる物品取り寄せ(実機動作) |
| ロボットによる物品取り寄せ(シミュレーション) | ロボットによる物品取り寄せ(実機動作) |
発表論文
- Tomoya Itsuka, Minsoo Song, Akihiro Kawamura, and Ryo Kurazume, Development of ROS2-TMS: New Software Platform for Informationally Structured Environment, ROBOMECH Journal, Vol.9, No.1, 2022, DOI:10.1186/s40648-021-00216-2
- Asuka Egashira, Yuta Horikawa, Takuma Hayashi, Akihiro Kawamura, and Ryo Kurazume, Near-future perception system: Previewed Reality, Advanced Robotics, Vol.35, No.1, pp.19-30, 2021, DOI:10.1080/01691864.2020.1829041
- Kazuto Nakashima, Yumi Iwashita, and Ryo Kurazume, Lifelogging caption generation via fourth-person vision in a human-robot symbiotic environment, ROBOMECH Journal, Vol.7, No.33, 2020, DOI:10.1186/s40648-020-00181-2
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals “Portable Go” for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.6, No.6, 2019, DOI:10.1186/s40648-019-0134-1
- Junya Sakamoto, Kouhei Kiyoyama, Kohei Matsumoto, Yoonseok Pyo, Akihiro Kawamura, Ryo Kurazume, Development of ROS-TMS 5.0 for Informationally Structured Environment, ROBOMECH Journal, Vol.5, No.24, 2018, DOI: 10.1186/s40648-018-0123-9
- Yuta Horikawa, Asuka Egashira, Kazuto Nakashima, Akihiro Kawamura, Ryo Kurazume, Previewed Reality: Near-future perception system, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), Vancouver, Canada, 2017.9.24-28, pp.370-375, 2017
- Ryo Kurazume, Yoonseok Pyo, Tokuo Tsuji, Akihiro Kawamura, Feasibility study of IoRT platform "Big Sensor Box", in Proc. IEEE International Conference on Robotics and Automation (ICRA2017), pp.3664-3671, 2017
- 倉爪 亮, ピョ ユンソク, 辻 徳生, 河村 晃宏, 情報構造化環境プラットフォームROS-TMSとBig Sensor Boxの提案, 日本ロボット学会誌, Vol.35, No.4, pp.346--357, 2017
- Kazuto Nakashima, Girard Julien, Yumi Iwashita, Ryo Kurazume, Automatic Houseware Registration System for Informationally-Structured Environment, 2016 IEEE/SICE International Symposium on System Integration (SII 2016), 2016.12.13-15, pp.337-342, 2016
- Yoonseok Pyo, Kouhei Nakashima, Shunya Kuwahata, Ryo Kurazume, Tokuo Tsuji, Ken'ichi Morooka, Tsutomu Hasegawa, Service Robot System with an Informationally Structured Environment, Robotics and Autonomous Systems, Vol.74, No.Part A, pp.148--165, 2015
- ピョ ヨンソク, 辻 徳生, 橋口 優香, 倉爪亮, 情報構造化環境における没入感VRインターフェースの開発, 日本ロボット学会誌, Vol.33, No.8, pp.651--654, 2015
- Tokuo Tsuji, Oscar Martinez Mozos, Hyunuk Chae, YoonSeok Pyo, Kazuya Kusaka, Tsutomu Hasegawa, Ken'ichi Morooka and Ryo Kurazume, The Informationally Structured Room for Robotic Assistancey, Sensors, Vol. 15, No. 4, pp.9438-9465, doi:10.3390/s150409438, 2015
- Yoonseok Pyo, Tsutomu Hasegawa, Tokuo Tsuji, Ryo Kurazume, Ken'ichi Morooka, Floor Sensing System using Laser Reflectivity for Localizing Everyday Objects and Robot, Sensors, Vol. 14, No.4, pp. 7524-7540, doi:10.3390/s140407524, April, 2014
- Ghallabi Farouk, Akihiro Kawamura, Yoonseok Pyo, Tokuo Tsuji, Ryo Kurazume, Control Architecture for Service Drone in Informationally Structured Environment, 2015 IEEE/SICE International Symposium on System Integration (SII 2015), Nagoya, Dec. 11-13, 2015
- Kazuto Nakashima, Yumi Iwashita, Yoonseok Pyo, Asamichi Takamine, Ryo Kurazume, Fourth-Person Sensing for a Service Robot, Proc. of IEEE International Conference on Sensors 2015, pp.1110-1113, Busan, Nov. 1-4, 2015
- Yoonseok Pyo, Kouhei Nakashima, Tokuo Tsuji, Ryo Kurazume, Ken'ichi Morooka, Motion Planing for Fetch-and-Give Task using Wagon and Service Robot, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.925-932, July 7-11, 2015
- Yoonseok Pyo, Tokuo Tsuji, Yuuka Hashiguchi, Ryo Kurazume, Immersive VR Interface for Informationally Structured Environment, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.1766-1771, July 7-11, 2015
- Yoonseok Pyo, Tsutomu Hasegawa, Masahide Tanaka, Tokuo Tsuji, Ken'ichi Morooka and Ryo Kurazume, Measurement and Estimation of Indoor Human Behavior of Everyday Life Based on Floor Sensing with Minimal Invasion of Privacy, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.2170-2176, Shenzhen, 2013
- 清山 昂平, 河村 晃宏, 倉爪 亮, 階層型情報構造化環境プラットフォームの開発, 第19回計測自動制御学会システムインテグレーション部門講演会 SI2018, pp.2064-2067, 2018.12.13-15
- 倉爪 亮, 情報構造化環境プラットフォームROS-TMS 4.0、5.0, 第18回計測自動制御学会システムインテグレーション部門講演会 SI2017, pp.1701-1704, 2017.12.20-22
- 清山 昂平, 坂本 潤弥, 河村 晃宏, 倉爪 亮, 呼び寄せコミュニケーションロボットを用いた見守りセンシング, 第18回計測自動制御学会システムインテグレーション部門講演会 SI2017, pp.1969-1971, 2017.12.20-22
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Yongjin Jung, Kazuto Nakashima, Akihiro Kawamura, Ryo Kurazume, Navigation system of personal mobility in informationally structured/unstructured environments, Proc. The 13th Joint Workshop on Machine Perception and Robotics (MPR17), , Peking, 2017.10.16-17
- 清山 昂平, 河村 晃宏, 倉爪 亮, 要介護者の見守りセンサターミナルの開発, 第17回計測自動制御学会システムインテグレーション部門講演会 SI2016, pp.2370-2372, 2016.12.15-17
- 倉爪 亮, サービスロボットシステムにおけるIOT事例, 2016年度日本機械学会年次大会, F16100, 2016.9.12
- 坂本 潤弥, 渡邊 裕太, 河村 晃宏, 倉爪 亮, 環境情報構造化アーキテクチャROS-TMS4.0を用いたロボットサービスの実現, 2016年度日本機械学会年次大会, pp.G1500501, 2016.9.14
- 中嶋 一斗, 岩下 友美, 高嶺 朝理, 倉爪 亮, 情報構造化環境におけるスマートグラスと Faster R-CNN を用いた日常物品登録システムの開発, 日本機械学会ロボティクスメカトロニクス講演会2016, pp.2P2-03a4, 2016.6.10
- ピョ ユンソク, 渡邊 裕太, 重兼 聡夫, 稲田 大亮, 辻 徳生, 河村 晃宏, 倉爪 亮, ROS-TMS ver.4.0 -情報構造化環境のためのオペレーティングシステム-, 第21回ロボティクスシンポジア, pp.242-249, 2016.3.18
- 倉爪 亮, ピョ ユンソク, 辻 徳生, 河村 晃宏, ROS-TMS と環境情報構造化空間 Big Sensor Box の開発, 第16回計測自動制御学会システムインテグレーション部門講演会 SI2015, 2M1-4, 2015.12.15
- 稲田 大亮, 辻 徳生, 倉爪 亮, 諸岡 健一, 高速3次元距離センサによる計測点群とのリアルタイム干渉判定に基づくオンライン回避動作の生成, 第33回日本ロボット学会学術講演会, 2B2-05, 2015.9.3-5
- 重兼 聡夫, 渡邊 裕太, 稲田 大亮, ピョ ユンソク, 辻 徳生, 河村 晃宏, 倉爪 亮, 屋内空間CPSプラットフォームBig Sensor Boxの開発と車いす型見守りロボットによる搬送実験, 第33回日本ロボット学会学術講演会, 3H1-02, 2015.9.3-5
- 渡邊 裕太, 倉爪 亮, ピョ ユンスク, 辻 徳生, 諸岡 健一, 多様なセンサを搭載した小型複合センサ端末の開発と人物追跡のための最適配置計画, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-H05, 2015.5.18
- 橋口 優香, ピョ ユンソク, 辻 徳生, 諸岡 健一, 倉爪 亮, 環境情報構造化プラットフォームROS-TMSにおけるタスク管理機構, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-N01, 2015.5.18
- ピョ ユンソク, 辻 徳生, 橋口 優香, 倉爪 亮, 没入感インターフェースOculus Riftを用いたROS-TMSビューアの開発, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-N07, 2015.5.18
- 中嶋 一斗, 岩下 友美, ピョ ユンソク, 高嶺 朝理, 倉爪 亮, サービスロボットのための第4人称センシングの提案, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-O03, 2015.5.18
- 杉野原 和也, 諸岡 健一, 辻 徳生, 倉爪 亮, レーザセンシングシステムと階層的隠れマルコフモデルによる居住者の行動推定, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-W04, 2015.5.18
- 大石 哲朗, 表 允晳, 辻 徳生, 諸岡 健一, 倉爪亮, 携帯端末とARマーカを用いたROS-TMSユーザインタフェースの開発, 第15回計測自動制御学会システムインテグレーション部門講演会 SI2014, 1G3-7, 2014.12.15
- 杉野原 和也, 諸岡 健一, 辻 徳生, 倉爪 亮, 階層的隠れマルコフモデルによる居住者の行動推定, 第15回計測自動制御学会システムインテグレーション部門講演会 SI2014, 3J4-2, 2014.12.17
- 橋口 優香, 表 允晳, 辻 徳生, 諸岡 健一, 倉爪 亮, 環境情報構造化プラットフォームROS-TMSにおけるタスク管理機構, 第32回日本ロボット学会学術講演会, 3C2-03, 2014.9.6
- 表 允晳, 辻 徳生, 橋口 優香 , 永田 晃洋, 中島 洸平, 倉爪 亮 , 長谷川 勉 , 諸岡 健一, 情報構造化アーキテクチャの提案とサービスロボットのオンライン動作計画の実現, 第19回ロボティクスシンポジア, pp. 624-630, 2014.3.14
小型センサーターミナル"ポータブル Go"の開発と知的車椅子ロボットの誘導
小型センサーターミナルロボットと,それにより誘導される知的車椅子ロボットを開発しています.
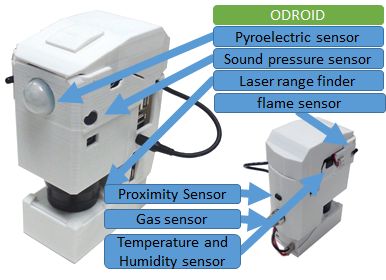 小型センサーターミナル (ポータブル)
小型センサーターミナル (ポータブル) |
移動体追跡 |
| 移動型小型センサーターミナル (ポータブル Go) | 移動型小型センサーターミナルの展開 |
| 知的車椅子 | 知的車椅子の誘導 |
| 知的車椅子の誘導 (B-senからエレベーター) | 知的車椅子の誘導 (エレベーターから屋外) |
発表論文
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals "Portable Go" for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.9, No.9, 2019, DOI:10.1186/s40648-019-0134-1
- Hiroyuki Yamada, Tomoki Hiramatsu, Imai Masato, Akihiro Kawamura, Ryo Kurazume, Sensor terminal "Portable" for intelligent navigation of personal mobility robots in informationally structured environment, 2019 IEEE/SICE International Symposium on System Integrations (SII), Paris, 2019.1.14-16, 2019
- 渡邊 裕太, 重兼 聡夫, 河村 晃宏, 倉爪 亮, 環境埋込センサと計測ロボット群によるパーソナルモビリティの屋内外の誘導, 日本機械学会ロボティクスメカトロニクス講演会2017, pp.2P2-H07, 2017.5.10-13
- 重兼 聡夫, 渡邊 裕太, 河村 晃宏, 倉爪 亮, 構造化/非構造化環境を移動可能なパーソナルモビリティの開発, 第17回計測自動制御学会システムインテグレーション部門講演会 SI2016, pp.2352-2355, 2016.12.15-17
- 渡邊 裕太, 重兼 聡夫, 河村 晃宏, 倉爪 亮, 情報構造化空間を拡張する群ロボットシステムの開発, 第34回日本ロボット学会学術講演会, pp.1A1-06, 2016.9.7
音声認識によるROS-TMSの制御システム
ROS-TMSのユーザインターフェースとして,音声認識システムを開発しました.
| サービスロボットの制御 | 電動ベッドの制御 |
| 照明制御 | 情報検索(物品) |
| 情報検索(天気) | 情報検索(知識Q&A) |
発表論文
- Junya Sakamoto, Kouhei Kiyoyama, Kohei Matsumoto, Yoonseok Pyo, Akihiro Kawamura, Ryo Kurazume, Development of ROS-TMS 5.0 for Informationally Structured Environment, ROBOMECH Journal, Vol.5, No.24, 2018, DOI: 10.1186/s40648-018-0123-9
- 坂本 潤弥, 河村 晃宏, 倉爪 亮, 介護施設向けロボットサービスプラットフォームROS-TMS 5.0の開発, 第35回日本ロボット学会学術講演会, 3J1-03, 2017.9.12-14
Big Sensor Box (B-Sen)
IoRT (Internet of Robots and Things)を技術を用いて、ヒトとロボットの共生社会が体験できる施設 Big Sensor Box (B-Sen)を構築しています。Big Sensor Boxは九州大学伊都キャンパスCOI棟2階に設置されており、リビングルーム、ベッドルーム、台所、トイレ、バスルーム等を備えた、居住可能な実験施設です。「ROS-TMS (ROS - Town Management System)」は、本環境におけるロボット、センサ制御システムです。
| 共進化イノベーション施設 | Big Sensor Box |
 Big Sensor Box
Big Sensor Box |
 Object search
Object search |
 Weather forecast
Weather forecast |
 Knowledge retrieval
Knowledge retrieval |
介護・見守りシステム
ROS-TMSと連動した分散センサによる介護,見守りシステムを開発しています.
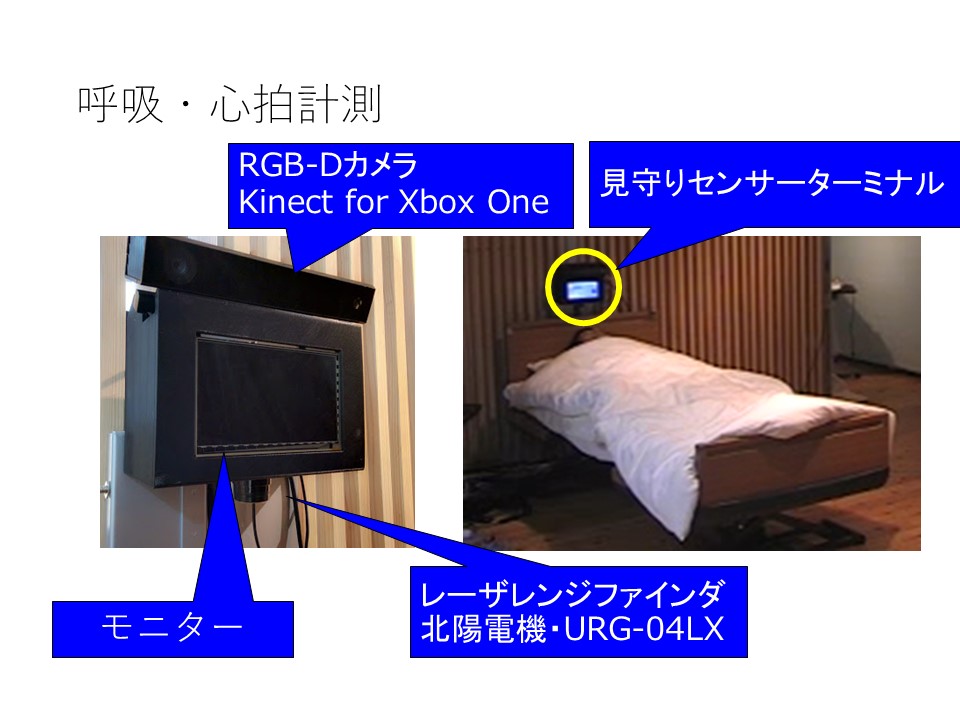 非接触心拍・位置センサ(Kinect, LRF) |
非接触心拍・位置センサ(Kinect, LRF) |
| 心拍計測 | 歩行検出 |
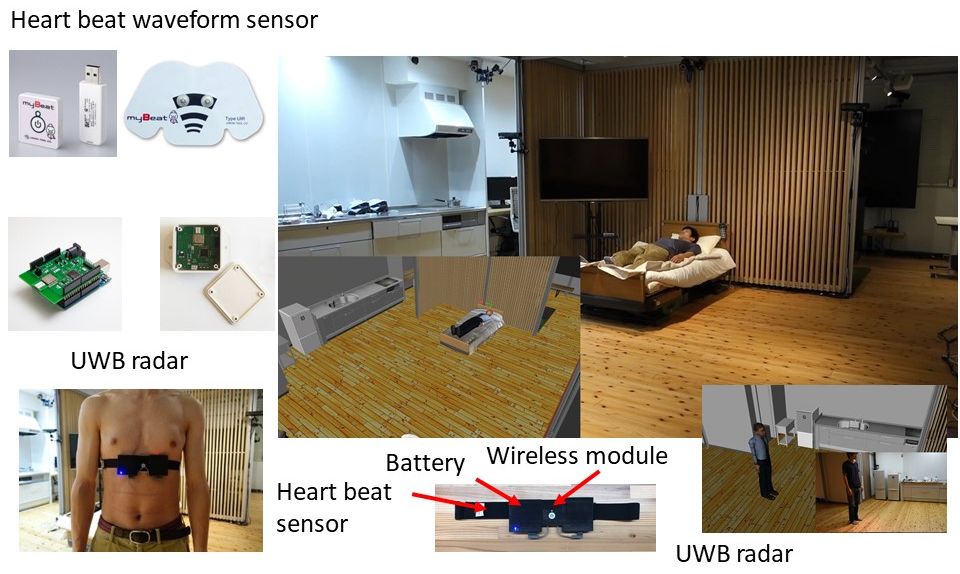 心拍と連動した位置計測センサ |
心拍と連動した位置計測 |
| 転倒検出 | 高精度小型ウエアラブル位置姿勢センサ |