RGB-Dカメラを用いたSLAM(Simultaneous Localization and Mapping)
Microsoft Kinectを4台搭載したSLAM (Simultaneous Localization and Mapping)ロボットを開発しています.SLAMにはCPS-SLAMを用いており,高精度な位置同定を実現しています.
| Kinectを用いたSLAM | 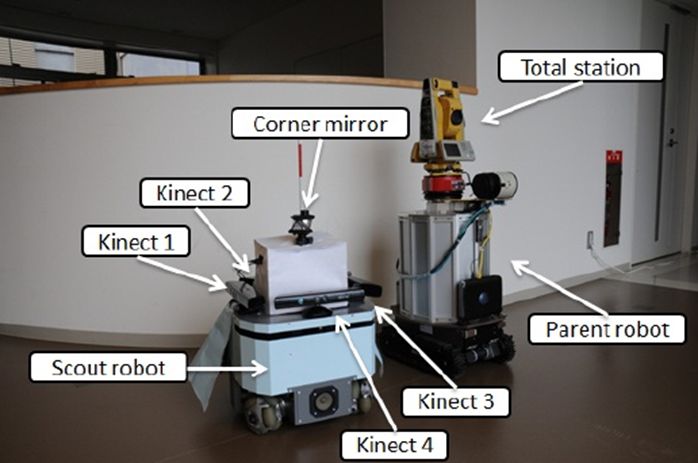 システム構成
システム構成 |
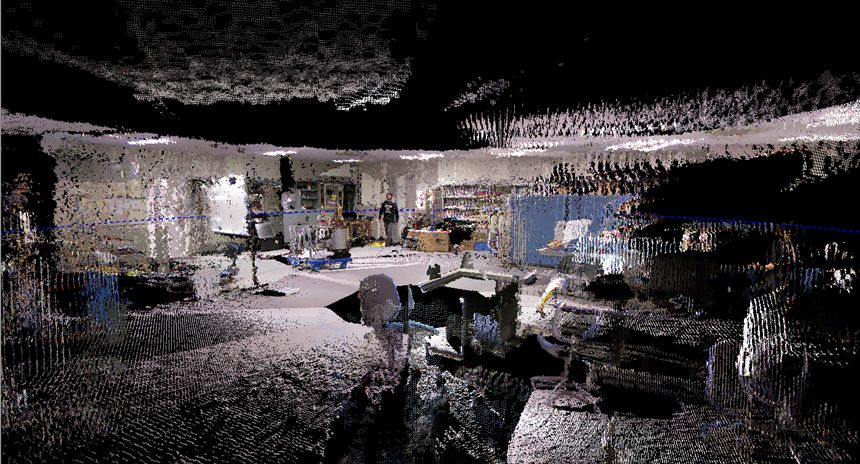 計測結果
計測結果 |
発表論文
- R. Kurazume, K. Yoneda, and S. Hirose, Feedforward and feedback dynamic trot gait control for quadruped walking vehicle, Autonomous Robots, Vol. 12, No. 2, pp.157-172, 2002.
- 鄭 龍振, 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, 広域レーザ計測地図とRGB-Dカメラを用いた移動ロボットの大域的3次元位置同定画像の認識理解シンポジウム (MIRU2012), IS2-77, 2012.8.7
- 鄭 龍振, 大石 修士, 倉爪 亮, 長谷川 勉, RGB-Dセンサと3 次元地図を用いたXORボックセルマッチングによる位置同定, 日本機械学会ロボティクスメカトロニクス講演会2012, 2A2-I10, (2012.5.27~29)
- 鄭 龍振, 石橋 正教, 倉爪 亮, 岩下 友美, 長谷川 勉, 4台のKinect を搭載した全方向計測ロボットによる環境計測, 第29回日本ロボット学会学術講演会, 1O3-4, 2011.9.7
Normal Distributions Transformを用いた移動ロボットの高速位置同定
KinectなどのRGB-Dカメラからの情報と予めレーザ計測された3次元環境地図を比較し,NDT (Normal Distributions Transform)を用いて高速に位置同定を行う手法を提案しています.
| Kinectカラー画像 | Kinect距離画像 | 位置同定結果 |
発表論文
- 鄭 龍振, 倉爪 亮, 岩下 友美, 長谷川 勉, 大規模な3次元環境地図とRGB-Dカメラを用いた移動ロボットの広域位置同定, 日本ロボット学会誌, Vol.31, No.10, pp.896-906, 2013 (2014年度日本ロボット学会論文賞)
- Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, ND voxel localization using large-scale 3D environmental map and RGB-D camera, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.538-545, Shenzhen, Dec. 12-14, 2013 (Best Paper Award Finalist)
- 鄭 龍振, 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, 広域レーザ計測地図とRGB-Dカメラを用いた移動ロボットの大域的3次元位置同定, 画像の認識理解シンポジウム (MIRU2012), IS2-77, 2012.8.7
- 鄭 龍振, 大石 修士, 倉爪 亮, 長谷川 勉, RGB-Dセンサと3 次元地図を用いたXORボックセルマッチングによる位置同定, 日本機械学会ロボティクスメカトロニクス講演会2012, 2A2-I10, (2012.5.27~29)
Quadcopter Helicopter
空中からの監視やレーザ計測が可能な,QuadcopterやHelicopterを開発しています.
| Helicopter | Helicopter | Helicopter |
 Quadcopter
Quadcopter |
 Quadcopter
Quadcopter |
Laser scanning from quadcopter |
発表論文
Normal Distributions Transformationを用いた移動ロボットによる環境変化検出
予め計測された環境の3次元地図と,移動ロボットに搭載したKinectなどのセンサ情報を比較し,NDT (Normal Distribution Transformation)を用いて高速に環境変化(差分)を検出する手法を提案しています.
 Kinect搭載移動ロボット
Kinect搭載移動ロボット |
差分検出結果 | ICRA 2019 Video |
発表論文
- Ukyou Katsura, Kohei Matsumoto, Akihiro Kawamura, Tomohide Ishigami, Tsukasa Okada, Ryo Kurazume,Spatial change detection using voxel classification by normal distribution transformation, IEEE International Conference on Robotics and Automation 2019 (ICRA 2019), pp.2953-2959, Montreal, Canada, 2019.5.20-24, 2019
- 桂 右京, 松本 耕平, 河村 晃宏, 倉爪 亮, 石上 智英, 岡田 典, 距離データに対するNDTを用いた高速な差分検出手法の提案 -屋内・屋外環境での差分検出精度の検証-, 日本機械学会ロボティクスメカトロニクス講演会2019, 2A1-R08, 2019.6.5-8
- 桂 右京, 倉爪 亮, 石上 智英, 岡田 典, 距離データに対するNDTを用いた高速な差分検出手法の提案, 第36回日本ロボット学会学術講演会, 3J3-01, 2018.9.5-7
- 桂 右京, 倉爪 亮, 石上 智英, 岡田 典, 距離データに対するNDTを用いた高速な差分検出手法の提案, 日本機械学会ロボティクスメカトロニクス講演会2017, pp.2A2-O08, 2017.5.10-13
ガイドロボットとパーソナルモビリティビークル
ROS-TMSを用いたガイドロボットとパーソナルモビリティビークルを開発しています.ロボットに搭載したセンサだけでなく,走行経路周囲のセンサとも連携しながら自律移動を行います.
| 立ち乗り型パーソナルモビリティビークル | 車椅子型パーソナルモビリティビークル |
 案内ロボット Qurin |
 案内ロボット Qurin 2 |
| 案内ロボット | QZSSと5Gを用いた案内ロボットの誘導 |
| 4K 360度動画の5G配信 | レーザセンサと5Gを用いた車いすロボットの誘導 |
| ハウステンボスでのガイドロボット実験 | 病院での見守りロボット |
発表論文
- Kohei Matsumoto, Hiroyuki Yamada, Masato Imai, Akihiro Kawamura, Yasuhiro Kawauchi, Tamaki Nakamura, Ryo Kurazume, Development of a Tour Guide and Co-experience Robot System using the Quasi-Zenith Satellite System and the 5th-Generation Mobile Communication System at a Theme Park, ROBOMECH Journal, Vol.8, No.4, 2021, DOI:10.1186/s40648-021-00192-7
- Kohei Matsumoto, Hiroyuki Yamada, Masato Imai, Akihiro Kawamura, Yasuhiro Kawauchi, Tamaki Nakamura, Ryo Kurazume, Quasi-Zenith Satellite System-based Tour Guide Robot at a Theme Park, 2020 IEEE/SICE International Symposium on System Integration (SII), pp. 1212-1217, doi: 10.1109/SII46433.2020.9025964, Honolulu, Hawaii, USA, Hawai, USA, 2020.1.12-15, 2020
- Hiroyuki Yamada, Tomoki Hiramatsu, Imai Masato, Akihiro Kawamura, Ryo Kurazume, Sensor terminal "Portable" for intelligent navigation of personal mobility robots in informationally structured environment, 2019 IEEE/SICE International Symposium on System Integrations (SII), Paris, 2019.1.14-16, 2019
- 松本 耕平, 今井 将人, 山田 弘幸, 河村 晃宏, 川内 康裕, 中村 珠幾, 倉爪 亮, 準天頂衛星測位システムを用いたテーマパークにおける案内ロボットシステムの開発, 日本機械学会ロボティクスメカトロニクス講演会2019, 1P1-R10, 2019.6.5-8
- 松本 耕平, 今井 将人, 山田 弘幸, 河村 晃宏, 倉爪 亮, テーマパークにおける自律案内ロボットの開発, 第19回計測自動制御学会システムインテグレーション部門講演会 SI2018, pp.2051-2054, 2018.12.13-15
- Kohei Matsumoto, Masato Imai, Hiroyuki Yamada, Akihiro Kawamura and Ryo Kurazume, Development of Autonomous Tour-Guide Robot System in a Theme Park, Proc. The 14th Joint Workshop on Machine Perception and Robotics (MPR18), PS4-7, Fukuoka, 2018.10.16-17
- 今井 将人, 平松 知樹, 山田 弘幸, 河村 晃宏, 倉爪 亮, パーソナルモビリティのための情報構造化環境の構築とテーマパークでの誘導実験, 日本機械学会ロボティクスメカトロニクス講演会2018, pp.2A2-D07, 2018.6.2-5
- 平松 知樹, 今井 将人, 山田 弘幸, 河村 晃宏, 倉爪 亮, 小型センサ端末によるパーソナルモビリティ・ビークルの誘導制御システムの開発, 日本機械学会ロボティクスメカトロニクス講演会2018, pp.1A1-L10, 2018.6.2-5
自動草刈りロボット
準天頂衛星「みちびき」や5Gネットワーク,レーザスキャナ,Visual SLAM などを組み合わせた自動草刈りロボットを開発しています.
 自動草刈りロボット1号機 |
 自動草刈りロボット2号機 |
発表論文
照度計測群ロボット
大規模倉庫などでの完成後検査で使用する照度計測用群ロボットを開発しています.
 照度計測用群ロボットによる計測作業 |
 照度計測用群ロボット |
| 照度計測作業 | 照度計測作業 |
発表論文
海岸清掃ロボット
海岸に打ち上げられたマイクロプラスチックごみを回収する海岸清掃ロボットを開発しています.
 海岸清掃ロボット |
 海岸計測ロボット |
| 海岸清掃作業 | 海岸清掃作業 |
発表論文
- 海洋破砕プラスチックごみ回収ロボットの開発
宇野 光輝, 倉爪 亮
第23回計測自動制御学会システムインテグレーション部門講演会 SI2022, 1A2-D04, 2022.12.14-16 [pdf][bibtex] - 海洋破砕プラスチックごみ回収ロボットシステムの開発 -レーザースキャナの反射輝度によるごみ検出とロボットの誘導-
有瀬 昌矢, 松本 耕平, 倉爪 亮
第23回計測自動制御学会システムインテグレーション部門講演会 SI2022, 1A2-D11, 2022.12.14-16 [pdf][bibtex] - 海洋破砕プラスチックごみ回収機構の開発
宇野 光輝, 倉爪 亮
第22回計測自動制御学会システムインテグレーション部門講演会 SI2021, 1H4-03, 2021.12.15-17 [pdf][bibtex] - 海洋破砕プラスチックごみ回収ロボットシステムの開発 レーザスキャナの反射輝度を用いた海岸環境の識別
有瀬 昌矢, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2021, 1P2-G09, 2021.6.6-8
[pdf][bibtex]
建設ロボット
レトロフィット(後付け)型遠隔操縦バックホーや複合センサターミナル(センサポッド)による振動ローラの転圧評価手法,土工現場を対象としたCyber Physical PlatformであるROS2-TMS for constructionなどを開発しています.
| レトロフィット型遠隔操縦バックホー | 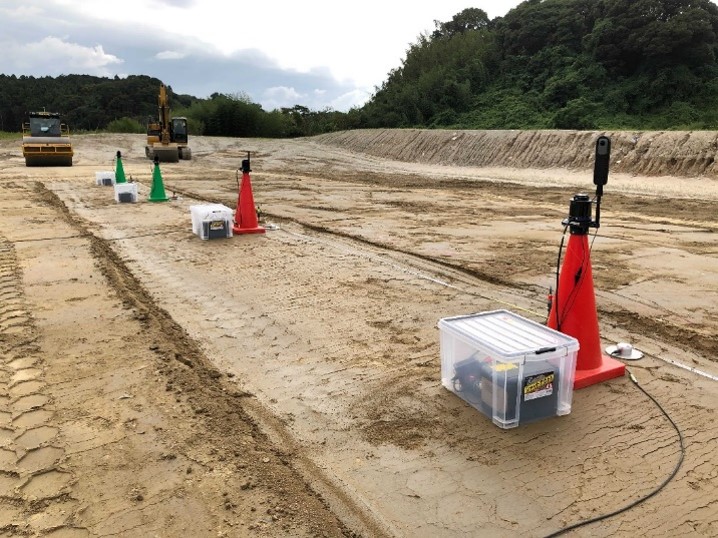 振動ローラの転圧評価用センサポッド |
発表論文
- 多様な環境に適応しインフラ構築を革新する協働AIロボット
永谷 圭司, 大須賀 公一, 淺間 一, 倉爪 亮
土木構造・材料論文集, Vol.39, No.0, pp.11-18, 2023-12-29, DOI:10.60345/kabse.39.0_11, 2023
[pdf][bibtex] - Field Implementation of an Automated Hydraulic Excavator Using ROS2-TMS for Construction and OPERA
Tomoya Kouno, Yuichiro Kasahara, Kota Akinari, Akinosuke Tsutsumi, Takayoshi Hachijo, Shunsuke Kimura, Yutaro Fikase, Yuki Miyashita, Takashi Yokoshima, Taro Abe, Daisuke Endo, Takeshi Hashimoto, Keiji Nagatani, Genki Yamauchi, Ryo Kurazume
2026 IEEE/SICE International Symposium on System Integration (SII), pp.-, doi:, 2026.1.11-14, Cancun, Mexico, 2026
[pdf][bibtex] - 3D Measurement System for Soil Loading by an Autonomous Backhoe using OPERA
Takayoshi Hachijo, Yutaro Fukase, Takashi Yokoshima, Yuki Miyashita, Shunsuke Kimura, Masanori Suzuki, Yuichiro Kasahara, Tomoya Kouno, Koshi Shibata, Ryo Kurazume, Daisuke Endo, Genki Yamauchi, Takeshi Hashimoto
42nd International Symposium on Automation and Robotics in Construction (ISARC 2025), pp.1501-1506, doi:10.22260/ISARC2025/0195, 2025.7.28-31, 2025
[pdf][bibtex] - Sensor Pods and ROS2-TMS for Construction for Cyber-Physical System at Earthwork Sites
Ryuichi Maeda, Tomoya Kouno, Kohei Matsumoto, Yuichiro Kasahara, Tomoya Itsuka, Kazuto Nakashima, Yusuke Tamaishi and Ryo Kurazume
IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), New York, 2024.11.12-14, pp.58-63, 2024, doi: 10.1109/SSRR62954.2024.10770031
[pdf][bibtex] - Task management system for construction machinery using the open platform OPERA
Yuichiro Kasahara, Tomoya Itsuka, Koshi Shibata, Tomoya Kouno, Ryuichi Maeda, Kohei Matsumoto, Shunsuke Kimura, Yutaro Fukase, Takashi Yokoshima, Genki Yamauchi, Daisuke Endo, Takeshi Hashimoto, and Ryo Kurazume
2024 IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Pasadena, 2024.8.26-30, pp.1929-1936, 2024, doi:10.1109/RO-MAN60168.2024.10731421
[pdf][bibtex] - Development of a Retrofit Backhoe Teleoperation System Using Cat Command
Koshi Shibata, Yuki Nishiura, Yusuke Tamaishi, Kohei Matsumoto, Kazuto Nakashima, Ryo Kurazume
2024 IEEE/SICE International Symposium on System Integration (SII), pp.1486-1491, doi:10.1109/SII58957.2024.10417625, 2024.1.8-11, Ha Long, Vietnam, 2024
[pdf][bibtex] - Evaluation of ground stiffness using multiple accelerometers on the ground during compaction by vibratory rollers
Yusuke Tamaishi, Kentaro Fukuda, Kazuto Nakashima, Ryuichi Maeda, Kohei Matsumoto, Ryo Kurazume
40th International Symposium on Automation and Robotics in Construction (ISARC 2023), pp. ,doi:, Chennai, 2023.7.4-7, 2023
[pdf][bibtex] - 土工現場向けCPSプラットフォームの開発と複数自律建機の連携による土砂掘削運搬実験
秋成 光太, 笠原 侑一郎, 高野 智也, 堤 哲之介, 山内 元貴, 遠藤 大輔, 阿部 太郎, 橋本 毅, 千葉 拓史, 小林 礼, 永谷 圭司, 倉爪 亮
第31回ロボティクスシンポジア, , 2026.3.17-18
[pdf][bibtex] - 土木施工現場の状況把握のためのセンサポッド実証機の開発 -第4報 河道閉塞現場における杭型センサポッドの設置と可視化-
高野 智也, 秋成 光太, 堤 哲之介, 笠原 侑一郎, 松本 耕平, 中嶋 一斗, 倉爪 亮
第26回計測自動制御学会システムインテグレーション部門講演会 SI2025, 1D5-07, 2025.12.10-12
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発 -第11報 大規模言語モデルを用いたタスク計画機構の開発-
堤 哲之介, 井塚 智也, 笠原 侑一郎, 高野 智也, 秋成 光太, 山内 元貴, 遠藤 大輔, 阿部 太郎, 橋本 毅, 永谷 圭司, 倉爪 亮
第26回計測自動制御学会システムインテグレーション部門講演会 SI2025, 2E1-08, 2025.12.10-12
[pdf][bibtex] - 土工現場向けCPSプラットフォーム ROS2-TMS for Construction の開発 -プラットフォームの概要と適用事例-
笠原 侑一郎, 高野 智也, 秋成 光太, 八條 貴誉, 木村 駿介, 深瀬 勇太郎, 宮下 裕貴, 横島 喬, 阿部 太郎, 遠藤 大輔, 橋本 毅, 永谷 圭司, 山内 元貴, 倉爪 亮
第23回建設ロボットシンポジウム, , 2025.10.15-17(優秀ポスター賞)
[pdf][bibtex] - 土工現場向けCPSプラットフォーム ROS2-TMS for Construction の開発 -第9報 土砂改良作業への適用事例-
高野 智也, 笠原 侑一郎, 秋成 光太, 八條 貴誉, 木村 駿介, 深瀬 勇太郎, 宮下 裕貴, 横島 喬, 阿部 太郎, 遠藤 大輔, 橋本 毅, 永谷 圭司, 山内 元貴, 倉爪 亮
第23回建設ロボットシンポジウム, , 2025.10.15-17 [pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発 -第7報 バックホウ・クローラダンプと複数 3D LiDAR による土砂の掘削・積載・運搬・放土作業の自動化-
笠原 侑一郎, 高野 智也, 秋成 光太, 佐野 紀子, 八條 貴誉, 木村 駿介, 宮下 裕貴, 深瀬 勇太郎, 横島 喬, 阿部 太郎, 山内 元貴, 遠藤 大輔, 橋本 毅, 永谷 圭司, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2025, 1A1-A06, 2025.6.4-7
[pdf][bibtex] - 土木施工現場の状況把握のためのセンサポッド実証機の開発 -第3報 杭型センサポッドの改良と性能検証-
高野 智也, 前田 龍一, 松本 耕平, 中嶋 一斗, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2025, 1A1-B05, 2025.6.4-7
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発 -第8報 没入感VRインターフェース OperaSimVR を用いたPreviewed Reality実験-
秋成 光太, 笠原 侑一郎, 高野 智也, 佐野 紀子, 松本 耕平, 山内 元貴, 遠藤 大輔, 阿部 太郎, 橋本 毅, 永谷 圭司, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2025, 1A1-B12, 2025.6.4-7
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発 -第6報 自律施工技術基盤OPERAとの連携によるクローラダンプの制御-
笠原 侑一郎, 高野 智也, 秋成 光太, 阿部 太郎, 山内 元貴, 遠藤 大輔, 橋本 毅, 永谷 圭司, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2025, 1A2-A06, 2025.6.4-7
[pdf][bibtex] - 土木施工現場の状況把握のためのセンサポッド実証機の開発 -第2報 運搬・設置が容易で長時間駆動する杭型センサポッドの開発-
高野 智也, 前田 龍一, 松本 耕平, 中嶋 一斗, 倉爪 亮
第25回計測自動制御学会システムインテグレーション部門講演会 SI2024, 2C2-09, 2024.12.18-20
[pdf][bibtex] - 土工現場用CPS プラットフォームROS2-TMS for Construction の開発 -第5報 没入感VRインターフェースOperaSimVRの開発-
秋成 光太, 笠原 侑一郎, 高野 智也, 松本 耕平, 倉爪 亮
第25回計測自動制御学会システムインテグレーション部門講演会 SI2024, 2C2-10, 2024.12.18-20
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発- 第3報 タスク管理機構の実装-
笠原 侑一郎, 井塚 智也, 柴田 航志, 前田 龍一, 高野 智也, 松本 耕平, 木村 駿介, 深瀬 勇太郎, 横島 喬, 山内 元貴, 遠藤 大輔, 橋本 毅, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2024, 2A1-B05, 2024.5.30-31
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発- 第4報 自律施工技術基盤 OPERA との連携-
柴田 航志, 高野 智也, 笠原 侑一郎, 井塚 智也, 前田 龍一, 松本 耕平, 木村 駿介, 深瀬 勇太郎, 横島 喬, 山内 元貴, 遠藤 大輔, 橋本 毅, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2024, 2A1-B06, 2024.5.30-31
[pdf][bibtex] - 土工現場用CPS プラットフォームROS2-TMS for Construction の開発 -第2報360 度カメラ映像を用いたCPS 可視化実験-
前田 龍一, 高野 智也, 松本 耕平, 中嶋 一斗, 倉爪 亮
第24回計測自動制御学会システムインテグレーション部門講演会 SI2023, 1D1-10, 2023.12.14-16
[pdf][bibtex] - 土木施工現場の状況把握のためのセンサポッド実証機の開発
高野 智也, 松本 耕平, 中嶋 一斗, 倉爪 亮,
第24回計測自動制御学会システムインテグレーション部門講演会 SI2023, 1D3-02, 2023.12.14-16
[pdf][bibtex] - 土工現場用 CPS プラットフォーム ROS2-TMS for Construction の開発
前田 龍一, 井塚 智也, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2023, 1P1-B03, 2023.6.28-30
[pdf][bibtex] - 土木工事における地盤剛性評価・安全管理のための分散型センサポッドの開発
福田 健太郎, 中嶋 一斗, 前田 龍一, 松本 耕平, 倉爪 亮
第23回ロボティクスシンポジア, , 2023.3.15-16 [pdf][bibtex] - レトロフィット型バックホウ遠隔操縦システムの開発 -第2報 操作性の向上と後付センシングシステムの開発-
柴田 航志, 西浦 悠生, 倉爪 亮
第23回計測自動制御学会システムインテグレーション部門講演会 SI2022, 3P2-G17, 2022.12.14-16 [pdf][bibtex] - 多点同期振動データの波形歪みに基づく地盤剛性評価手法の提案
福田 健太郎, 中嶋 一斗, 倉爪 亮
第20回 建設ロボットシンポジウム, P2-2, 2022.8.24-25
[pdf][bibtex] - 多様な環境に適応しインフラ構築を革新する協働AIロボット(土工を革新するハードウエアと現場を俯瞰するセンサポッドシステムの紹介)
永谷圭司, 大須賀公一, 竹囲年延, 倉爪亮
第4回 i-Constructionの推進に関するシンポジウム, pp.115-118, 2022.7.11
[pdf][bibtex] - レトロフィット型バックホウ遠隔操縦システムの開発
西浦 悠生, 中嶋 一斗, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2022, 1P1-C07, 2022.6.1-4
[pdf][bibtex] - 転圧地盤評価のための分散型センサポッドの開発 -第2 報多点同期振動データの波形歪みに基づく地盤剛性の定量化-
福田健太郎, 中嶋 一斗, 倉爪 亮
日本機械学会ロボティクスメカトロニクス講演会2022, 1A1-E04, 2022.6.1-4
[pdf][bibtex] - 転圧地盤評価のための分散型センサポッドの開発
福田 健太郎, 中嶋 一斗, 倉爪 亮
第22回計測自動制御学会システムインテグレーション部門講演会 SI2021, 3H4-05, 2021.12.15-17 [pdf][bibtex]