Robot Town Project
We are conducting a research project called the Robot Town Project, which aims to develop a management system for distributed sensors—such as cameras, laser range finders, and IC tags—alongside service robots. The objective is to enable service robots to efficiently perform tasks for humans in everyday environments by coordinating with these distributed sensing systems.
| Tracking of multiple targets | Tracking humans in a house |
| Tracking of 11 people by singe particle filter |
| Human motion capturing by distributed cameras | Robot control by gesture |
Papers
- Kouji Murakami, Tokuo Tsuji, Tsutomu Hasegawa, Ryo Kurazume, Object tracking system by integrating multi-sensored data, The 42nd Annual Conference of IEEE Industrial Electronics Society (IECON 2016), Firenze, Italy, 2016.10.24-27, 2016
- Yoonseok Pyo, Tsutomu Hasegawa, Masahide Tanaka, Tokuo Tsuji, Ken'ichi Morooka and Ryo Kurazume, Measurement and Estimation of Indoor Human Behavior of Everyday Life Based on Floor Sensing with Minimal Invasion of Privacy, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.2170-2176, Shenzhen, 2013
- Oscar Martinez Mozos, Tokuo Tsuji, Hyunuk Chae, Shunya Kuwahata, Tsutomu Hasegawa, Ken'ichi Morooka, Ryo Kurazume, The Intelligent Room for Elderly Care, The fifth International Workconference on the Interplay between Natural and Artificial Computation (IWINAC2013), June 10-14 2013, Mallorca Spain, 2013
- Ken'ichi Morooka, Shuji Sonoki, Ryo Kurazume, Tsutomu Hasegawa, A Method for Estimating Patient Specific Parameters for Simulation of Tissue Deformation by Finite, The fifth International Workconference on the Interplay between Natural and Artificial Computation (IWINAC2013), June 10-14 2013, Mallorca Spain, 2013
- Ryo Kurazume, Yumi Iwashita, Koji Murakami, and Tsutomu Hasegawa, Introduction to the Robot Town Project and 3-D Co-operative Geometrical Modeling Using Multiple Robots, 15th International Symposium on Robotics Research (ISRR 2011), Flagstaff, August 28-31, 2011.
- Kouji Murakami, Tsutomu Hasegawa, Yasunobu Nohara, Byong Won Ahn, and Ryo Kurazume, Position Tracking System for Commodities in an Indoor Environment, Proc. of IEEE International Conference on Sensors, pp.1879-1882, USA, Nov. 2010
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Detecting Repeated Motion Patterns using Partly Locality Sensitive Hashing, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS10), pp.1353-1358, Taipei, October 18-22, 2010
- Kouji Murakami, Tsutomu Hasegawa, Yasunobu Nohara, Byong-won Ahn, Ryo Kurazume, Position Tracking System for Commodities in a Daily Life Environment, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS10), pp.3712-3718, Taipei, October 18-22, 2010
- Oscar Martinez Mozos, Ryo Kurazume, Tsutomu Hasegawa, Multi-Part People Detection Using 2D Range Data, International Journal of Social Robotics, Vol.2 , No.1 , pp.31-40, (2010.3)
- Yumi Iwashita, Masaki Saito, Ryo Kurazume, Tsutomu Hasegawa, Motion Tracking in Daily Environment Using Distributed Image and Laser Sensors, The First International Workshop on Human Behavior Sensing, Kassel, Germany, June 15, 2010.
- Yumi Iwashita, Ryo Kurazume, Takamitsu Mori, Masaki Saito and Tsutomu Hasegawa, Model-based motion tracking system using distributed network cameras, in Proc. IEEE International Conference on Robotics and Automation, pp.3020-3025, Anchorage, May 3-8, 2010.
- Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume, and Yoshihiko Kimuro, Supporting Robotic Activities in Informationally Structured Environment with Distributed Sensors and RFID Tags, Journal of Robotics and Mechatronics, Vol.21, No.4, pp.453-459, (2009.8)
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Fast Repetitious Motion Pattern Detection Method via Dynamic Programming using Motion Density, in Proc. IEEE International Conference on Robotics and Automation, pp.1743-1749, May 12-17, 2009.
- Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume and Yoshihiko Kimuro, A Structured Environment with Sensor Networks for Intelligent Robots, Proc. of IEEE Int. Conf. on Sensors, pp.705-708, Lecce, Italy, Oct. 2008
- Tsuyoshi Yokoya, Tsutomu Hasegawa, Ryo Kurazume, and Kouji Murakami, Calibration of Distributed Vision Network in Unified Coordinate System by Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.1412-1417, April 2008.
- Kazuya Matsuo, Kouji Murakami, Tsutomu Hasegawa, Ryo Kurazume, A Decision Method for the Placement of Tactile Sensors for Manipulation Task Recognition, in Proc. IEEE International Conference on Robotics and Automation, pp.1641-1646, April 2008.
- Tsuyoshi Yokoya, Tsutomu Hasegawa, and Ryo Kurazume, Calibration of Widely Distributed Vision Cameras by Mobile Robots with Cooperative Positioning, 17th IFAC World Congress, pp.-, July 2008.
- Koichi Ogawara, Yasufumi Tanabe, Ryo Kurazume, Tsutomu Hasegawa, Learning Meaningful Interactions from Repetitious Motion Patterns, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3350-3355, Nice, Sep. 2008
- Ryo Kurazume, Hiroyuki Yamada, Kouji Murakami, Yumi Iwashita, and Tsutomu Hasegawa, Target Tracking Using SIR and MCMC Particle Filters by Multiple Cameras and Laser Range Finders, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3838-3844, Nice, Sep. 2008
- Kazuya Matsuo, Kouji Murakami, Tsutomu Hasegawa, and Ryo Kurazume, Recognition of Manipulation Sequences by Human Hand Based on Support Vector Machine, The 33rd Annual Conference of the IEEE Industrial Electronics Society (IECON'07), pp. 2801-2806, Taipei, Taiwan, November. 2007
- Tsutomu Hasegawa, Kouji Murakami, Ryo Kurazume, Yosuke Senta, Yoshihiko Kimuro, Takafumi Ienaga, Robot Town Project: Sensory Data Management and Interaction with Robot of Intelligent Environment for Daily Life, 2007 International Conference on Ubiquitous Robots and Ambient Intelligence (URAI07), 2007.
- Yoonseok Pyo, Tokuo Tsuji, Shunya Kuwahata, Tsutomu Hasegawa, Ken’ichi Morooka, Ryo Kurazume, Informationally Structured Environment for Elderly Care House, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-O-02, Kyoto, 2012.10.31-11.1
- Kouji Murakami, Kousuke Shigematsu, Tsutomu Hasegawa, Ryo Kurazume, Position Tracking System of Everyday Objects in a Care Facility, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, OS6-4, 2010.10
- Koji Sokabe, Ryo Kurazume, Hiroyuki Yamada, Kouji Murakami, Yumi Iwashita, and Tsutomu Hasegawa, Tracking Pedestrians by Color Histograms and Range Data, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps1-9, (2009 10)
- Shinji Tarumi, Yumi Iwashita, Ryo Kurazume, and Makoto Hashizume, Development of Pseudo 3D Visualization System for Endoscopic Ultrasonography, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-5, (2009 10)
- Ryo Kurazume, Kouji Murakami, Yumi Iwashita and Tsutomu Hasegawa, Target Tracking Using Particle Filters by Multiple Sensor Pods, Proc. 4th Joint Workshop on Machine Perception and Robotics (PKMPR2008), pp.-, (2008 11)
ROS-TMS (ROS - Town Management System)
We have been developing an informationally structured room designed to support the daily activities of elderly or disabled individuals. This environment integrates multiple sensor modalities in a natural and non-invasive manner by embedding sensors throughout the room. In parallel, we are developing an operating system that seamlessly connects and controls a variety of robots and sensors. This system manages sensor and robot modules, as well as the associated database, through a platform called ROS-TMS (ROS - Town Management System).
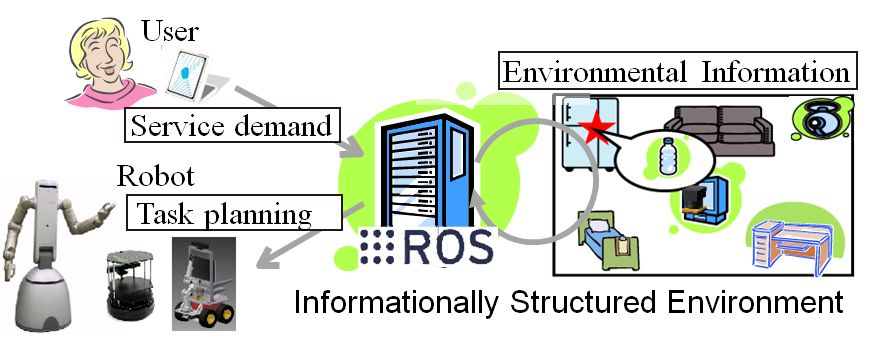 Overview
Overview |
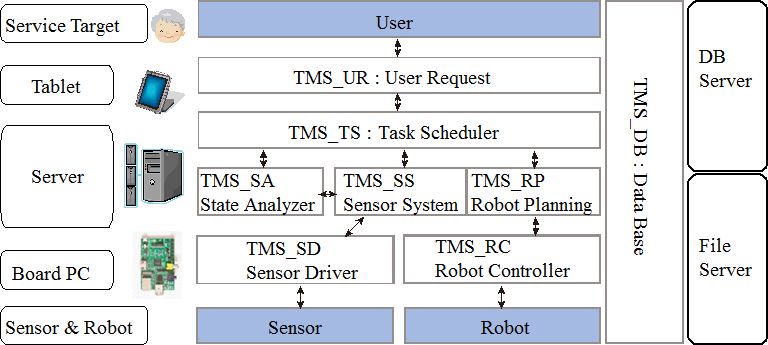 ROS-TMS architecture
ROS-TMS architecture |
| Intelligent refrigerator | Intelligent cabinet |
| Object recommendation using smart glass | Object recommendation using smartphone |
| Immersive VR Interface | Service robot with Velodyne Lidar |
| Fetch task by service robot (simulation) | Fetch task by service robot (real) |
| Fetch task by service robot (simulation) | Fetch task by service robot (real) |
Papers
- Tomoya Itsuka, Minsoo Song, Akihiro Kawamura, and Ryo Kurazume, Development of ROS2-TMS: New Software Platform for Informationally Structured Environment, ROBOMECH Journal, Vol.9, No.1, 2022, DOI:10.1186/s40648-021-00216-2
- Kohei Matsumoto, Hiroyuki Yamada, Masato Imai, Akihiro Kawamura, Yasuhiro Kawauchi, Tamaki Nakamura, Ryo Kurazume, Development of a Tour Guide and Co-experience Robot System using the Quasi-Zenith Satellite System and the 5th-Generation Mobile Communication System at a Theme Park, ROBOMECH Journal, Vol.8, No.4, 2021, DOI:10.1186/s40648-021-00192-7
- Asuka Egashira, Yuta Horikawa, Takuma Hayashi, Akihiro Kawamura, and Ryo Kurazume, Near-future perception system: Previewed Reality, Advanced Robotics, Vol.35, No.1, pp.19-30, 2021, DOI:10.1080/01691864.2020.1829041
- Kazuto Nakashima, Yumi Iwashita, and Ryo Kurazume, Lifelogging caption generation via fourth-person vision in a human-robot symbiotic environment, ROBOMECH Journal, Vol.7, No.33, 2020, DOI:10.1186/s40648-020-00181-2
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals “Portable Go” for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.6, No.6, 2019, DOI:10.1186/s40648-019-0134-1
- Junya Sakamoto, Kouhei Kiyoyama, Kohei Matsumoto, Yoonseok Pyo, Akihiro Kawamura, Ryo Kurazume, Development of ROS-TMS 5.0 for Informationally Structured Environment, ROBOMECH Journal, Vol.5, No.24, 2018, DOI: 10.1186/s40648-018-0123-9
- Yuta Horikawa, Asuka Egashira, Kazuto Nakashima, Akihiro Kawamura, Ryo Kurazume, Previewed Reality: Near-future perception system, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017), Vancouver, Canada, 2017.9.24-28, pp.370-375, 2017
- Ryo Kurazume, Yoonseok Pyo, Tokuo Tsuji, Akihiro Kawamura, Feasibility study of IoRT platform "Big Sensor Box", in Proc. IEEE International Conference on Robotics and Automation (ICRA2017), pp.3664-3671, 2017
- Kazuto Nakashima, Girard Julien, Yumi Iwashita, Ryo Kurazume, Automatic Houseware Registration System for Informationally-Structured Environment, 2016 IEEE/SICE International Symposium on System Integration (SII 2016), 2016.12.13-15, pp.337-342, 2016
- Yoonseok Pyo, Kouhei Nakashima, Shunya Kuwahata, Ryo Kurazume, Tokuo Tsuji, Ken'ichi Morooka, Tsutomu Hasegawa, Service Robot System with an Informationally Structured Environment, Robotics and Autonomous Systems, Vol.74, No.Part A, pp.148--165, 2015
- Tokuo Tsuji, Oscar Martinez Mozos, Hyunuk Chae, YoonSeok Pyo, Kazuya Kusaka, Tsutomu Hasegawa, Ken'ichi Morooka and Ryo Kurazume, The Informationally Structured Room for Robotic Assistancey, Sensors, Vol. 15, No. 4, pp.9438-9465, doi:10.3390/s150409438, 2015
- Yoonseok Pyo, Tsutomu Hasegawa, Tokuo Tsuji, Ryo Kurazume, Ken'ichi Morooka, Floor Sensing System using Laser Reflectivity for Localizing Everyday Objects and Robot, Sensors, Vol. 14, No.4, pp. 7524-7540, doi:10.3390/s140407524, April, 2014
- Ghallabi Farouk, Akihiro Kawamura, Yoonseok Pyo, Tokuo Tsuji, Ryo Kurazume, Control Architecture for Service Drone in Informationally Structured Environment, 2015 IEEE/SICE International Symposium on System Integration (SII 2015), Nagoya, Dec. 11-13, 2015
- Kazuto Nakashima, Yumi Iwashita, Yoonseok Pyo, Asamichi Takamine, Ryo Kurazume, Fourth-Person Sensing for a Service Robot, Proc. of IEEE International Conference on Sensors 2015, pp.1110-1113, Busan, Nov. 1-4, 2015
- Yoonseok Pyo, Kouhei Nakashima, Tokuo Tsuji, Ryo Kurazume, Ken'ichi Morooka, Motion Planing for Fetch-and-Give Task using Wagon and Service Robot, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.925-932, July 7-11, 2015
- Yoonseok Pyo, Tokuo Tsuji, Yuuka Hashiguchi, Ryo Kurazume, Immersive VR Interface for Informationally Structured Environment, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2015), pp.1766-1771, July 7-11, 2015
- Yoonseok Pyo, Tsutomu Hasegawa, Masahide Tanaka, Tokuo Tsuji, Ken'ichi Morooka and Ryo Kurazume, Measurement and Estimation of Indoor Human Behavior of Everyday Life Based on Floor Sensing with Minimal Invasion of Privacy, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.2170-2176, Shenzhen, 2013
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Yongjin Jung, Kazuto Nakashima, Akihiro Kawamura, Ryo Kurazume, Navigation system of personal mobility in informationally structured/unstructured environments, Proc. The 13th Joint Workshop on Machine Perception and Robotics (MPR17), , Peking, 2017.10.16-17
Small sensor terminal robots "Portable Go" and intelligent wheelchair robot
We are developing multiple small sensor terminal robots as well as an intelligent wheelchair robot.
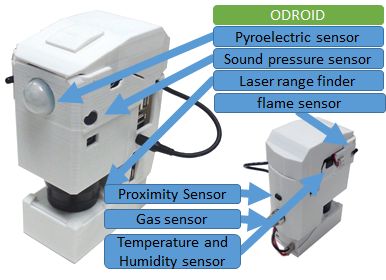 Small sensor terminal (Portable)
Small sensor terminal (Portable) |
Pedestrian tracking |
| Multiple sensor terminal robots(Portable Go) | Deplayment of multiple robots |
| Wheelchair robot | Guide of wheelchair robot |
| Guide of wheelchair robot) | Guide of wheelchair robot |
Papers
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals "Portable Go" for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.9, No.9, 2019, DOI:10.1186/s40648-019-0134-1
- Hiroyuki Yamada, Tomoki Hiramatsu, Imai Masato, Akihiro Kawamura, Ryo Kurazume, Sensor terminal "Portable" for intelligent navigation of personal mobility robots in informationally structured environment, 2019 IEEE/SICE International Symposium on System Integrations (SII), Paris, 2019.1.14-16, 2019
Voice control system for ROS-TMS
We are developing a voice-based robot control system integrated with ROS-TMS. The goal of this system is to improve the ease and efficiency of human–robot interaction by leveraging advanced voice recognition and processing technologies.
| Service robot | Robotic bed |
| Light control | Object search |
| Weather forecast | Knowledge retrieval |
Papers
Big Sensor Box (B-Sen)
The Big Sensor Box (B-Sen) is an experimental smart house designed to facilitate human–robot coexistence, developed using IoRT (Internet of Robots and Things) technology. Located in the COI Building on the Ito Campus of Kyushu University, B-Sen features a fully functional living environment, including a living room, bedroom, kitchen, and bathroom. The facility is managed by ROS-TMS (ROS - Town Management System), a control platform that coordinates the operation of robots and sensors throughout the environment.
| COI innovation faculty | Big Sensor Box |
 Big Sensor Box
Big Sensor Box |
 Object search
Object search |
 Weather forecast
Weather forecast |
 Knowledge retrieval
Knowledge retrieval |
Elderly care and monitoring system
We are developing a nursing care monitoring system for the elderly, leveraging distributed sensors managed by ROS-TMS. The system is designed to enhance the safety and well-being of seniors by enabling continuous, real-time monitoring through advanced sensor technologies. This innovative approach allows for the prompt detection and response to unusual activities or emergencies, offering peace of mind to both the elderly and their caregivers.
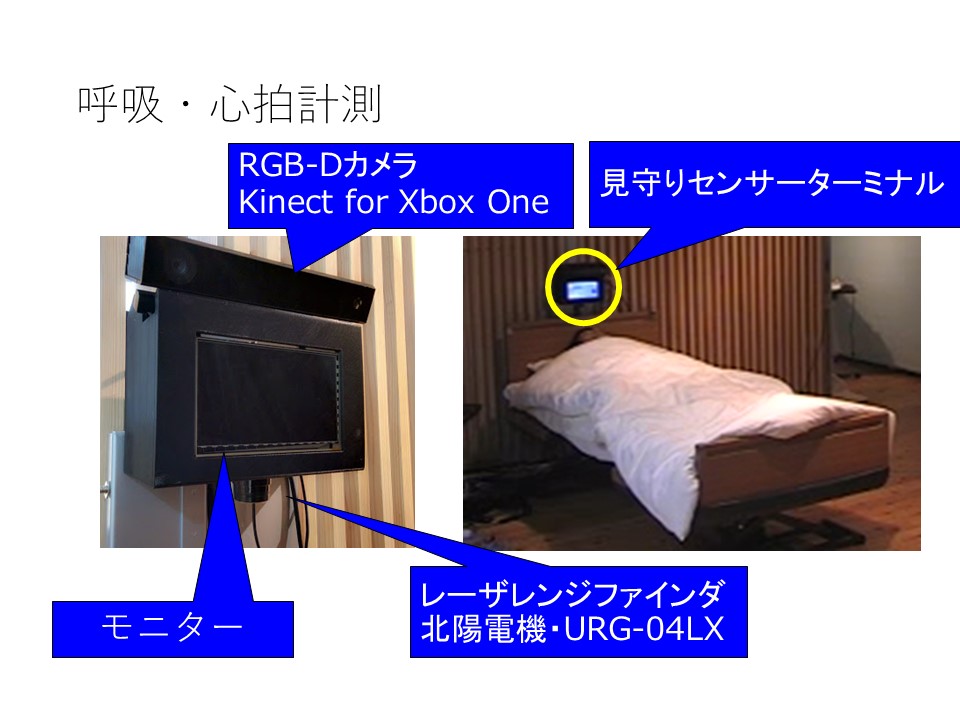 Noninvasive heartbeat and positon sensor (Kinect, LRF) |
Noninvasive heartbeat and positon sensor (Kinect, LRF) |
| Heartbeat rate | Walking detection |
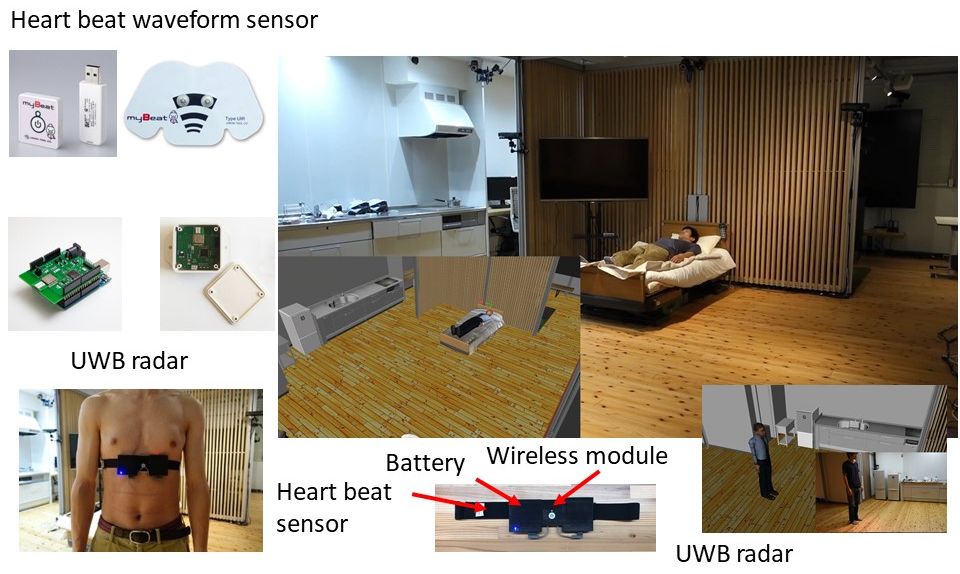 Wearable heartbeat and position sensor |
Heartbeat measurement with accurate positioning |
| Fall detection | High precise and small wearable position sensor |