Study on CPS SLAM - 3D laser measurement system for large scale architectures using multiple mobile robots
To construct three-dimensional models of large-scale architectural structures using a laser range finder, multiple range images must be captured from different viewpoints and aligned through post-processing techniques such as the Iterative Closest Point (ICP) algorithm. Typically, to ensure precise alignment, these range images must first be manually registered to positions close to the correct ones prior to applying ICP. Furthermore, sufficient overlap between range images must be ensured by capturing them from densely spaced viewpoints. We propose a novel measurement system for large-scale architectural modeling using a team of mobile robots equipped with onboard laser range finders. Each measurement position is accurately determined using a high-precision Cooperative Positioning System (CPS), which takes advantage of the coordinated operation of multiple robots. This approach enables the construction of 3D models of large-scale structures without the need for post-processing procedures such as the ICP algorithm or dense viewpoint sampling.
 A group of robots equipped with laser range finder, CPS-VIII |
3D models by automatic modeling |
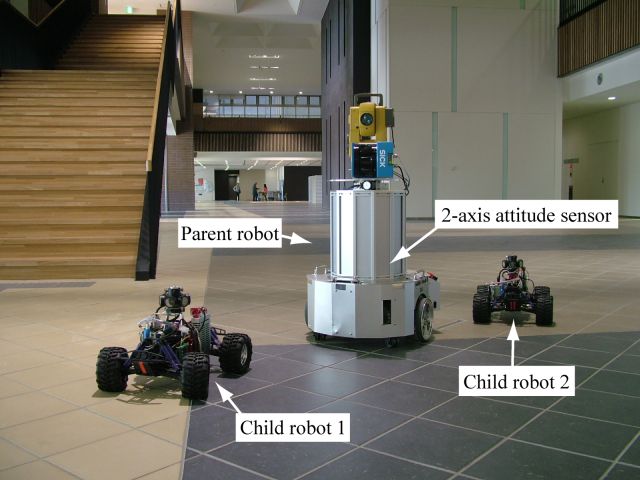 A group of robots equipped with laser range finder, CPS-V |
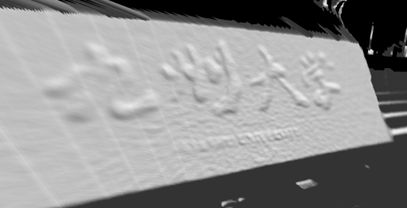
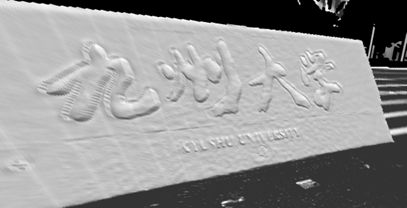
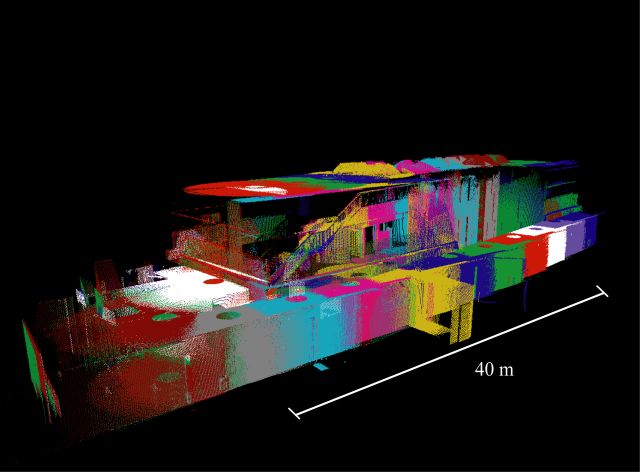 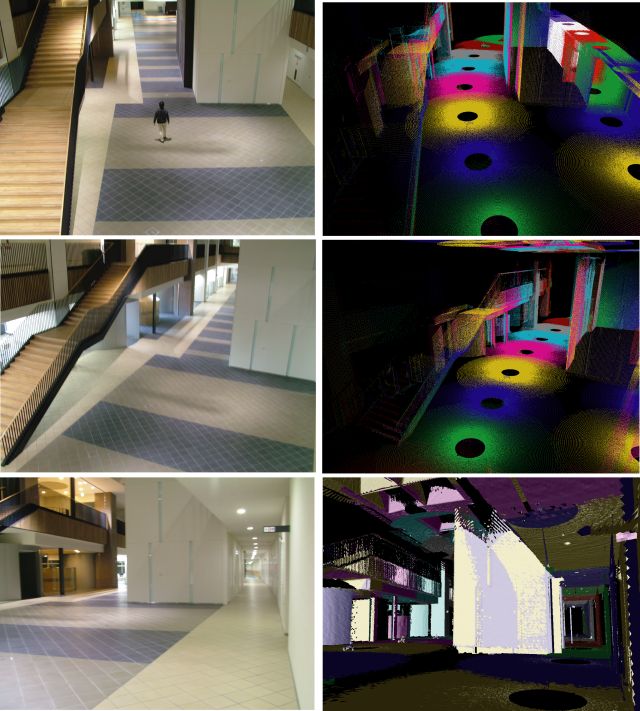 3D map of large scale architecture
3D map of large scale architecture |
| Introduction (19MB) | Introduction (14MB) |
 Dazaifu Tenmangu shrine
Dazaifu Tenmangu shrine |
 Dazaifu Tenmangu shrine
Dazaifu Tenmangu shrine |
| Seibuen Park | Kyushu University |
Papers
- Ryo Kurazume, Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Automatic large-scale three dimensional modeling using cooperative multiple robots, Computer Vision and Image Understanding, Vol.157, pp. 25-42, 2017, doi:10.1016/j.cviu.2016.05.008
- Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Ryo Kurazume, Automatic planning of laser measurements for a large-scale environment using CPS-SLAM system, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), Hamburg, Germany, Sep. 28-Oct. 2, 2015
- Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, ND voxel localization using large-scale 3D environmental map and RGB-D camera, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.538-545, Shenzhen, Dec. 12-14, 2013(Best Paper Award Finalist)
- Yongjin Jeong, Ryo Kurazume, Yoonseok Pyo, Yumi Iwashita, Tsutomu Hasegawa, High-Precision Three-Dimensional Laser Measurement System by Cooperative Multiple Mobile Robots, 2012 IEEE/SICE International Symposium on System Integration (SII2012), pp.198-205, Fukuoka, 2012.12.16-18, 2012
- Yukihiro Tobata, Ryo Kurazume, Yusuke Noda, Kai Lingemann, YumiIwashita, Tsutomu Hasegawa, Laser-based geometrical modeling of large-scale architectural structures using co-operative multiple robots, Autonomous Robot, Vol.32, No.1, pp. 49-62, (2012)
- Yukihiro Tobata, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, Automatic laser-based geometrical modeling using multiple mobile robots, 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO 2010), pp.363-369, Tianjin, Dec. 14-18, 2010 (T.J.Tarn Best Paper in Robotics)
- Ryo Kurazume, Yusuke Noda, Yukihiro Tobata, Kai Lingemann, Yumi Iwashita, Tsutomu Hasegawa, Laser-based Geometric Modeling using Cooperative Multiple Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.3200-3205, May 12-17, 2009.
- Ryo Kurazume, Yukihiro Tobata, Yumi Iwashita, Tsutomu Hasegawa, 3D laser measurement system for large scale architectures using multiple mobile robots, The 6th International Conference on 3-D Digital Imaging and Modeling (3DIM2007), August 2007.
- Yusuke Noda, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Laser-based Modeling of Cultural Heritage Using Cooperative Multiple Robots, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-4, (2009 10)
- Yukihiro Tobata, Ryo Kurazume, and Tsutomu Hasegawa, Study on CPS SLAM, Proc. The Third Joint Workshop on Machine Perception and Robotics, CD-ROM, (2007.11).(Best Poster Session Award)
Laser measurement system of precise tunnel shape
A three-dimensional shape measurement platform for urban structures, such as tunnels under construction, has been developed. The system consists of a mobile platform equipped with a two-dimensional laser scanner, a three-axis fiber optic gyroscope, corner cubes, integrated software, and a total station. The total station is placed at reference points within the tunnel and is used to measure the positions of the corner cubes mounted on the mobile platform. As the mobile platform moves, the two-dimensional laser scanner continuously captures cross-sectional profiles of the tunnel. These profiles are then reconstructed into a three-dimensional tunnel shape using positional data obtained from the total station and orientation data from the fiber optic gyroscope. The integrated software enables real-time, on-site comparison between the measured tunnel geometry and the design geometry from a 3D CAD model, imported via the standard LandXML format. Error distributions between the actual and design shapes are visualized through a graphical user interface, supporting effective construction process management.
 Laser measurement system
Laser measurement system |
Multiple robot system |
| Real-time tunnel shape measurement | Measured 3D tunnel shape |
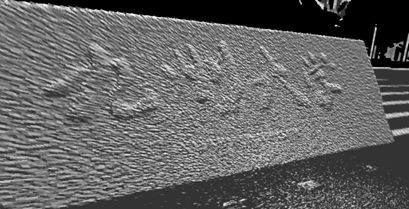
Smoothing and impainting technique using laser reflectivity
We developed two denoising techniques for noisy range images using reflectivity information: range image smoothing with a trilateral filter and range image inpainting via belief propagation. The trilateral filter incorporates reflectivity, spatial, and intensity information to preserve geometric features such as jump edges and roof edges while effectively smoothing noise. The inpainting technique based on belief propagation restores deteriorated range images by leveraging not only neighboring range values but also the continuity of the reflectance image. Simulations and experiments using both synthetic and real range images acquired by a laser scanner demonstrate that the proposed techniques effectively suppress noise, preserve critical geometric features, and repair degraded range data.
 Raw range image
Raw range image |
 Bilateral filter
Bilateral filter |
 Proposed filter
Proposed filter |
 Shape recognition by slit laser using reflectivity
Shape recognition by slit laser using reflectivity |
 Reflectance image
Reflectance image |
 Recognition of reflectance image
Recognition of reflectance image |
Papers
- Kazuto Nakashima, Seungwoo Nham, Hojung Jung, Yumi Iwashita, Ryo Kurazume, Oscar Mozos, Recognizing Outdoor Scenes by Convolutional Features of Omni-directional LiDAR Scans, 2017 IEEE/SICE International Symposium on System Integration (SII 2017), Taiwan, 2017.12.11-14
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Range Image Smoothing and Completion utilizing Laser Intensity, Advanced Robotics, Volume 27, Issue 12, pp.947-958, August 2013
- Shuji Oishi, Naoaki Kondo, Yumi Iwashita, Ryo Kurazume, Object recognition by a laser scanner using multimodal information, 11th International Conference on Quality Control by Artificial Vision (QCAV), pp.-, Fukuoka, May 30 - June 1, 2013
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Colorization of 3D Geometric Model utilizing Laser Reflectivity, in Proc. IEEE International Conference on Robotics and Automation, pp.2311-2318, Karlsruhe, May 6-10, 2013 (IEEE Robotics and Automation Society Japan Chapter Young Award)<
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Denoising of Range Images using a Trilateral Filter and Belief Propagation, 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2011), pp.2020--2027, San Francisco, September 25-30, 2011.
- Naoaki Kondo, Shuji Oishi, Yumi Iwashita, Ryo Kurazume, Classification of Urban Area Using Laser Scanner, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-P-04 , Kyoto, 2012.10.31-11.1
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Texture Restoration Using Laser Attributes, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-P-03, Kyoto, 2012.10.31-11.1
- Shuji Oishi, Yumi Iwashita, Ryo Kurazume, Color Mapping on 3D Model Using Laser Reflectivity, Proc. The Eighth Joint Workshop on Machine Perception and Robotics (MPR12), PS2-4, Fukuoka, 2012.10.16
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Surface Smoothing using a Trilateral filter, Proc. The Seventh Joint Workshop on Machine Perception and Robotics (MPR11), OS6-2,Beijing, 2011.10.14
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Smoothing Range Image using Reflectivity, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, PS1-10, 2010.10
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Development of Denoising Techniques Using Reflectivity, ENSEEIHT- Kyushu University Workshop on Data Mining, and Media Processing (EKDM 2011), Toulouse, France, Nov. 24,25, 2011
6D localization using range and reflectance data
We developed a 6D global localization technique that combines range and reflectance data from a laser scanner with the bag-of-features (BoF) approach. Global localization is essential for determining the accurate global position of a mobile robot when revisiting a known environment. Map-based global localization achieves high positional accuracy by computing precise transformations between the current observation and the pre-built map. However, it involves comparing large 3D datasets, which is computationally intensive. In contrast, appearance-based global localization uses image retrieval techniques to estimate the global position based on structural similarity. While it operates in real time, it typically relies on external illumination and performs poorly in low-light or dark environments. To address these limitations, we propose a hybrid approach that integrates map-based and appearance-based localization. Rather than using conventional camera images for appearance-based localization, we utilize reflectance images, which are captured as a byproduct of range sensing by the laser scanner. This enables robust global localization even in dark environments while maintaining real-time performance and high accuracy.
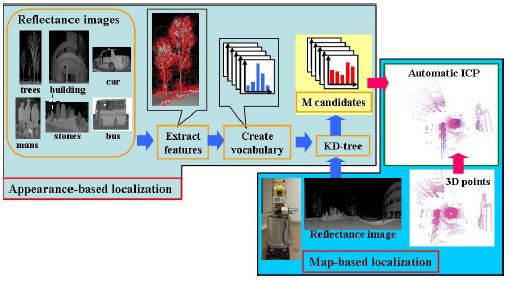 Proposed technique
Proposed technique |
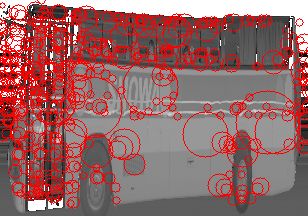
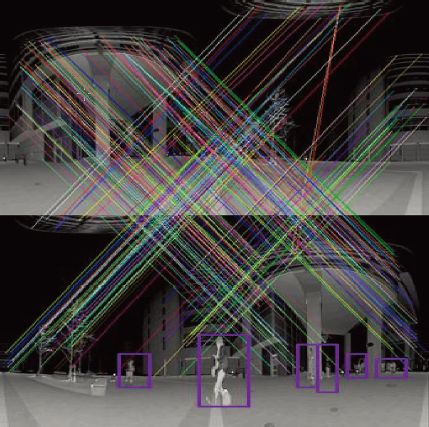 Pairs in reflectance images using BoF
Pairs in reflectance images using BoF |
Papers
- Dong Xiang ZHANG, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Robust global localization using laser reflectivity, Journal of Robotics and Mechatronics, vol.25, no.1, 2013
- Dong Xiang Zhang, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Robot localization under perceptual aliasing conditions based on laser reflectivity using particle filter, 2011 IEEE/SICE International Symposium on System Integration (SII2011), pp.--, Kyoto, 2011.12.20-22, 2011
- DongXiang Zhang, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Appearance and map-based global localization using laser reflectivity, 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.--, Phuket, 2011.12.7-11, 2011
- Dong Xiang Zhang, Ryo Kurazume, Yumi Iwashita, An effective method for robot positioning based on panoramic reflectance images, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, PS1-9, 2010.10
Geometrical and photometrical modeling of real objects using laser range finders and digital cameras
Tokyo University, Ikeuchi Lab.
| Textured image of Kamakura Great Buddha |
Papers
- Katsushi Ikeuchi, Takeshi Oishi, Jun Takamatsu, Ryusuke Sagawa, Atsushi Nakazawa, Ryo Kurazume, No Nishino, Mawo Kamakura and Yasuhide Okamoto, The Great Buddha Project: Digitally Archiving, Restoring, and Analyzing Cultural Heritage Objects, International Journal of Computer Vision, Vol.75, No.1, pp.189-208, (2007.2)
- Ryo Kurazume, Ko Nishino, Mark D. Wheeler, Katsushi Ikeuchi, Mapping textures on 3D geometric model using reflectance image, Systems and Computers in Japan, Vol. 36, Issue 13, pp.92-101, (2005.11)
- Takeshi Oishi, Atsushi Nakazawa, Ryo Kurazume, and Katsushi Ikeuchi, Fast Simultaneous Alignment of Multiple Range Images Using Index Images, in Proc. The 5th International Conference on 3-D Digital Imaging and Modeling (3DIM), pp.476-483,2005.
- Yuichiro Hirota, Tomohito Masuda, Ryo Kurazume, Kohichi Ogawara, Kazuhide Hasegawa, Katsushi Ikeuchi, Flying Laser Range Finder and its data registration, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3155-3160, 2004.
- Yuichiro Hirota, Tomohito Masuda, Ryo Kurazume, Koichi Ogawara, Kazuhide Hasegawa, Katsushi Ikeuchi, Designing a laser range finder which is suspended beneath a balloon, Proc. of Sixth Asian Conference on Computer Vision (ACCV), 2004.
- Takeshi Oishi, Ryusuke Sagawa, Atsushi Nakazawa, Ryo Kurazume, Katsushi Ikeuchi, Parallel Alignment of a Large Number of Range Images, Proc. The 4th International Conference on 3D Digital Imaging and Modeling (3DIM 2003) , pp.195-202, 2003
- Ryusuke Sagawa, Takeshi Oishi, Atsushi Nakazawa, Ryo Kurazume, Katsushi Ikeuchi, Iterative Refinement of Range Images with Anisotropic Error Distribution,Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems, October 2002
- Ryo Kurazume, Ko Noshino, Zhengyou Zhang, and Katushi Ikeuchi, Simultaneous 2D images and 3D geometric model registration for texture mapping utilizing reflectance attribute, Proc. of Fifth Asian Conference on Computer Vision (ACCV), vol.1, pp.99-106, 2002.
- Katsushi Ikeuchi, Yutaka Takase, Ryo Kurazume, Takeshi Oishi, Ryusuke Sagawa, Ko Nishino, Modeling Cultural Heritage Through Observation, Int. Sympo. on Artificial Intelligence, Robotics and Human Centered Technology for Nuclear Applications, pp.26-32, 2002
- Ryo Kurazume, Mark D. Wheeler, and Katushi Ikeuchi, Mapping textures on 3D geometric model using reflectance image, Workshop for Data Fusion at IEEE Int. Conf. on Robotics and Automation, 2001.