移動ロボット群を用いたレーザレンジファインダによる大規模建造物の3次元幾何モデリング
現存する大規模歴史的建造物を高精度レーザ計測し,正確な3次元形状をデジタルデータとして保存するプロジェクトが各地で進められています.通常,大規模建造物の全体モデルを得るには,多くの位置にレーザ計測装置を移動して多数回の計測を行い,得られた3次元点データをICP法などの後処理により位置合わせする手順が用いられます.しかし,実際にICP法が正確に収束するためには,それぞれの3次元点データがある程度正しい相対位置関係になるように,通常人手により大まかな初期位置あわせを行う必要があり,また各計測地点で得られた3次元点データが十分に重なるように測定を密に行わなければなりませんでした.これに対し,我々はこれまでに開発した群ロボットシステムによる高精度位置同定手法(CPS)と,移動可能なレーザ計測装置を組み合わせ,ICP法などの後処理や密な測定を必ずしも必要としない移動ロボット群による大規模建造物の3次元レーザ計測システムを提案しています.
 レーザレンジファインダを搭載した群ロボット, CPS-V-III |
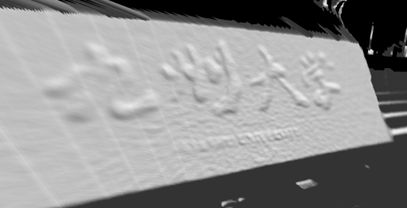
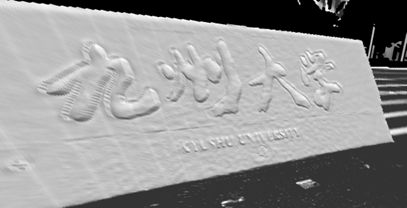
自動計測された3次元モデル |
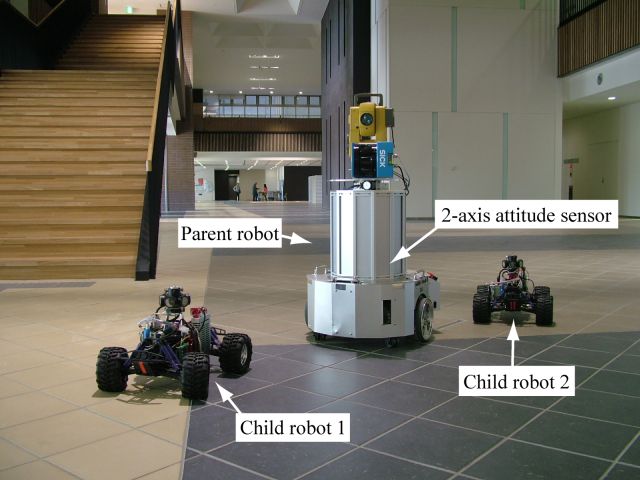 レーザレンジファインダを搭載した群ロボット, CPS-V |
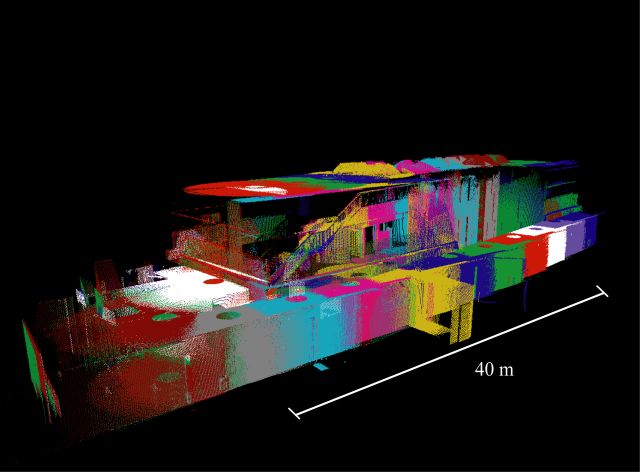 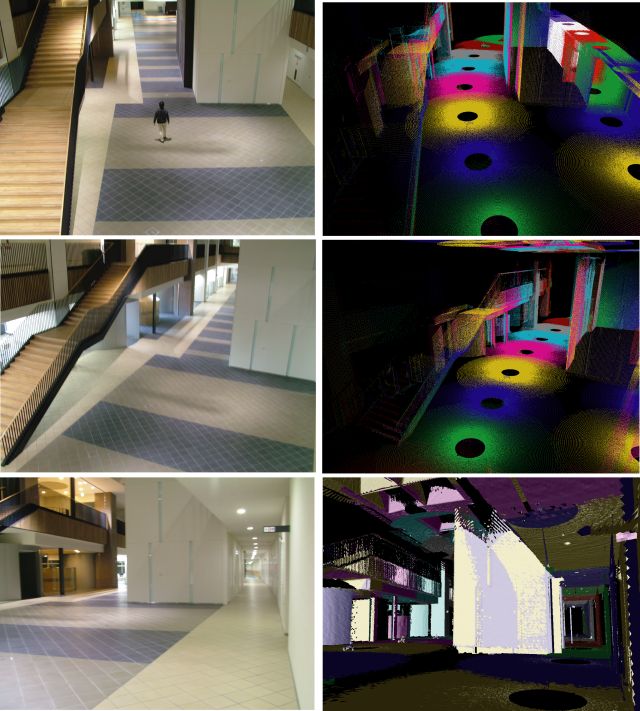 大規模建造物の3Dマップ
大規模建造物の3Dマップ |
| システム紹介(19MB) | システム紹介(14MB) |
 太宰府天満宮
太宰府天満宮 |
 太宰府天満宮
太宰府天満宮 |
| せいぶえん遊園地 | 総合学習プラザ |
発表論文
- Ryo Kurazume, Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Automatic large-scale three dimensional modeling using cooperative multiple robots, Computer Vision and Image Understanding, Vol.157, pp. 25-42, 2017, doi:10.1016/j.cviu.2016.05.008
- Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Ryo Kurazume, Automatic planning of laser measurements for a large-scale environment using CPS-SLAM system, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), Hamburg, Germany, Sep. 28-Oct. 2, 2015
- 大島 漱一郎, 永倉 翔吾, 鄭 龍振, 岩下 友美, 倉爪 亮, CPS-SLAM による大規模環境のレーザ観測の自動計画手法, 日本ロボット学会誌, Vol.33, No.4, pp.263-274, 2015
- Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, ND voxel localization using large-scale 3D environmental map and RGB-D camera, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.538-545, Shenzhen, Dec. 12-14, 2013(Best Paper Award Finalist)
- Yongjin Jeong, Ryo Kurazume, Yoonseok Pyo, Yumi Iwashita, Tsutomu Hasegawa, High-Precision Three-Dimensional Laser Measurement System by Cooperative Multiple Mobile Robots, 2012 IEEE/SICE International Symposium on System Integration (SII2012), pp.198-205, Fukuoka, 2012.12.16-18, 2012
- 鄭 龍振, 岩下 友美, 倉爪 亮, CPS-SLAMの研究 -計測精度の向上とトンネル出来形計測システムの構築-, 日本ロボット学会誌, Vol.30, No.1, pp.180-187, 2012
- Yukihiro Tobata, Ryo Kurazume, Yusuke Noda, Kai Lingemann, YumiIwashita, Tsutomu Hasegawa, Laser-based geometrical modeling of large-scale architectural structures using co-operative multiple robots, Autonomous Robot, Vol.32, No.1, pp. 49-62, (2012)
- Yukihiro Tobata, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, Automatic laser-based geometrical modeling using multiple mobile robots, 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO 2010), pp.363-369, Tianjin, Dec. 14-18, 2010 (T.J.Tarn Best Paper in Robotics)
- 横矢 剛, 長谷川 勉, 倉爪 亮, 村上 剛司, 群ロボットによる未知環境3次元地図の自動作成のための動作計画手法, 電子情報通信学会誌, Vol.J93-D, No.6, pp.1024-1035, (2010.6)
- Ryo Kurazume, Yusuke Noda, Yukihiro Tobata, Kai Lingemann, Yumi Iwashita, Tsutomu Hasegawa, Laser-based Geometric Modeling using Cooperative Multiple Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.3200-3205, May 12-17, 2009.
- 倉爪 亮, 戸畑 享大, 村上 剛司, 長谷川 勉, CPS-SLAMの研究-大規模建造物の高精度3次元幾何形状レーザ計測システム-, 日本ロボット学会誌, Vol.25, No.8, pp.1234-1242, (2007.11)
- Ryo Kurazume, Yukihiro Tobata, Yumi Iwashita, Tsutomu Hasegawa, 3D laser measurement system for large scale architectures using multiple mobile robots, The 6th International Conference on 3-D Digital Imaging and Modeling (3DIM2007), August 2007.
- 小山 翔平, 岩下 友美, 倉爪 亮, クワッドコプタ搭載LRFと単眼カメラによるBaySACを用いた地表面計測, 第15回計測自動制御学会システムインテグレーション部門講演会 SI2014, 1M2-2, 2014.12.15-17
- 大島 漱一郎, 鄭 龍振, 岩下 友美, 倉爪 亮, 高精度レーザスキャナとクワッドコプタを用いたレーザ計測群ロボットシステムの開発, 第32回日本ロボット学会学術講演会, 1J3-03, 2014.9.4
- 大島 漱一郎, 永倉 翔吾, 岩下 友美, 倉爪 亮, 群ロボットによる大規模環境のレーザ観測の自動計画, 第14回建設ロボットシンポジウム, 2014.8.28/li>
- 永倉 翔吾, 倉爪 亮,岩下 友美, 長谷川 勉, 群ロボットによる3次元環境地図自動構築システムの開発 位置同定誤差の蓄積を低減する観測戦略, 日本機械学会ロボティクスメカトロニクス講演会2013, 1A2-H04, 2013.5.22~25
- 永倉翔吾, 倉爪亮, 岩下友美, 長谷川勉, ロボットの環境計測作業の自動計画手法, 第30回日本ロボット学会学術講演会, 1B2-3, 2012.9.17
- 鄭 龍振, 岩下 友美, 倉爪 亮, 長谷川 勉, ロボット群による大規模実環境の高精度レーザ計測, コンピュータビジョンとイメージメディア(CVIM), Vol.2012-CVIM-180, No.28, 2012,1,19
- 鄭 龍振, 倉爪 亮, 岩下 友美, 長谷川 勉, 群ロボットによる大規模構造物レーザ計測システム, 第29回日本ロボット学会学術講演会, 1O3-2, 2011.9.7
- 鄭 龍振, 倉爪 亮, 岩下 友美, 長谷川 勉, 自動化された協調ポジショニングシステムによる3次元環境地図の自動生成, 第11回計測自動制御学会システムインテグレーション部門講演会, 1I3-4, 2010.12.23.
- 野田裕介, 倉爪亮, 岩下友美, 長谷川勉, カラー画像の分割領域を用いた2D/3D位置合わせ, 画像の認識理解シンポジウム (MIRU2010), IS2-11, 2010.7
- Yusuke Noda, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Laser-based Modeling of Cultural Heritage Using Cooperative Multiple Robots, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-4, (2009 10)
- 野田裕介, 倉爪亮, 岩下友美, 長谷川勉, レーザ・カメラ搭載群ロボットによる太宰府天満宮の幾何光学計測, 画像の認識理解シンポジウム (MIRU2009), IS3-34, 2009.7
- 野田 裕介, 倉爪 亮, 岩下 友美, 長谷川 勉, 移動ロボット群を用いた大規模文化遺産の幾何・光学モデリング, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-E06, (2009.5)
- 野田 裕介, 倉爪 亮, 岩下 友美, 長谷川 勉, 移動ロボット群を用いた大規模文化遺産のデジタルアーカイブ, 第14回ロボティクスシンポジア, 3C3, 2009.3.16
- 戸畑 享大, 倉爪 亮, 村上 剛司, 長谷川 勉, 移動ロボット群による大規模建造物の3次元レーザ計測システムの開発, 第13回ロボティクスシンポジア講演会予稿集, (2008.3).
- 倉爪 亮, 戸畑 享大, 岩下 友美, 村上 剛司, 長谷川 勉, 群移動ロボットによる広域3次元レーザ計測システムの開発, 三次元映像のフォーラム, (2008.3)
- 倉爪 亮, 戸畑 享大, 村上 剛司, 長谷川 勉, 群ロボットによるCPS-SLAMと大規模構造物の幾何モデリング, 社)精密工学会画像応用技術専門委員会講演予稿集, (2008.1)
- Yukihiro Tobata, Ryo Kurazume, and Tsutomu Hasegawa, Study on CPS SLAM, Proc. The Third Joint Workshop on Machine Perception and Robotics, CD-ROM, (2007.11).(Best Poster Session Award)
- 戸畑 享大, 倉爪 亮, 村上 剛司, 長谷川勉, 群ロボットを用いた大規模3次元環境計測システム, 第25回日本ロボット学会学術講演会講演予稿集, (2007.9)
- 戸畑 享大,倉爪 亮,村上 剛司,長谷川 勉,移動ロボット群による大規模建造物の3次元レーザ計測システムの開発,画像の認識理解シンポジウム (MIRU2007), OS-A9-01, (2007 7)
- 戸畑 享大,倉爪 亮,山田 弘幸,村上 剛司,長谷川 勉,CPS SLAM の研究 第2報 CPS とレーザ計測による屋内3次元地図の自動構築実験,日本機械学会ロボティクスメカトロニクス講演会, 2P1-G04, (2007.5)
- 戸畑 享大,倉爪 亮,村上 剛司,長谷川 勉,CPS SLAMの研究 -CPS-Vの構築とSLAM実験-,第24回日本ロボット学会学術講演会講演予稿集,,1E14,(2006.9)
土木・建設現場におけるレーザ搭載移動ロボットによる出来形管理
情報化施工は,ICT(情報通信技術)を用いて高品質で高効率な施工を実現する手法として,近年注目を集めています.特にトンネル堀削工事では,現在では一般に平面図・横断図などの二次元形状データを用いて施工管理が行われていますが,掘削計画や掘削形状は三次元であることを考えると,施工管理も三次元形状データを用いて行うことが望ましいと考えられます.我々は,レーザを搭載した2種類の移動ロボットシステムにより,施工中のトンネル出来形形状を計測し,三次元データを用いたトンネル施工管理を行うシステムを開発しています.
 レーザ搭載移動ロボット
レーザ搭載移動ロボット |
計測作業の様子 |
| リアルタイム誤差計測 | トンネル計測結果 |
発表論文
- 遠藤 健, 池野谷 尚史, 古賀 祐一郎, 倉爪 亮, 三次元形状計測装置を用いた建設構造物の施工管理システムの開発, 日本ロボット学会誌, Vol.30, No.1, pp.84-90, 2012
- 池田 直広,池野谷 尚史,遠藤 健,倉爪 亮,柳原 好孝, 移動式三次元形状計測システムを用いた施工管理技術の提案, 第14回建設ロボットシンポジウム, 2014.8.28
- 倉爪 亮, 池田 直広, 遠藤 健, 池野谷 尚史, 柳原 好孝, 三次元形状計測器の施工現場適用事例の紹介 -開発システムの適用事例と今後の課題-, 日本機械学会ロボティクスメカトロニクス講演会2013, 1A1-Q11, 2013.5.22~25
- 石橋 正教, 鄭 龍振, 倉爪 亮, 清水 遠, 田中 洋一郎, 長瀬 雅之, 簡易測量用レーザスキャナの開発と屋外計測実験, 日本機械学会ロボティクスメカトロニクス講演会2012, 1A2-A08, (2012.5.27~29)
- 池野谷 尚史, 遠藤 健, 倉爪 亮, 古賀 祐一郎, 三次元形状計測システムによる山岳トンネルの出来形計測, 土木学会全国大会, pp.--, 2011.9.7-9
- 遠藤 健, 倉爪 亮, 池野谷 尚史, 三次元形状計測装置による建設構造物の出来形計測?第三報 道路トンネル工事への適用?, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-B10, (2011.5.27)
- 古賀祐一郎, 倉爪亮, 遠藤健, 池野谷尚史, 三次元形状計測装置による建設構造物の出来形計測―第二報 模擬トンネルを用いた計測実験―, 第28回日本ロボット学会学術講演会講演予稿集, 2G2-7, 2010.9
- 遠藤 健, 倉爪 亮, 古賀 祐一郎, 三次元形状計測装置による建設構造物の出来形計測?施工中の計測データと設計データのリアルタイム照合?, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-A28, (2010.6)
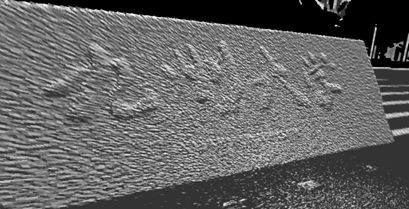
レーザリフレクタンスを用いたレーザ計測の高性能化
レーザスキャナーから得られる情報には,”距離”と”反射レーザ光の強度”の2つがあります.本研究では反射レーザ光の強度を巧みに利用して,画像の平滑化や修復,画像理解を行う手法を開発しています.
 距離画像
距離画像 |
 バイラテラルフィルタ
バイラテラルフィルタ |
 提案フィルタ
提案フィルタ |
 スリットレーザによる移動体の認識
スリットレーザによる移動体の認識 |
 リフレクタンス画像
リフレクタンス画像 |
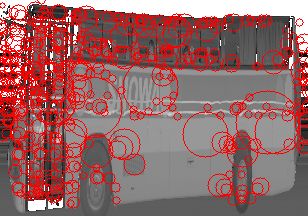 リフレクタンス画像認識
リフレクタンス画像認識 |
発表論文
- Kazuto Nakashima, Seungwoo Nham, Hojung Jung, Yumi Iwashita, Ryo Kurazume, Oscar Mozos, Recognizing Outdoor Scenes by Convolutional Features of Omni-directional LiDAR Scans, 2017 IEEE/SICE International Symposium on System Integration (SII 2017), Taiwan, 2017.12.11-14
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Range Image Smoothing and Completion utilizing Laser Intensity, Advanced Robotics, Volume 27, Issue 12, pp.947-958, August 2013
- Shuji Oishi, Naoaki Kondo, Yumi Iwashita, Ryo Kurazume, Object recognition by a laser scanner using multimodal information, 11th International Conference on Quality Control by Artificial Vision (QCAV), pp.-, Fukuoka, May 30 - June 1, 2013
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Colorization of 3D Geometric Model utilizing Laser Reflectivity, in Proc. IEEE International Conference on Robotics and Automation, pp.2311-2318, Karlsruhe, May 6-10, 2013 (IEEE Robotics and Automation Society Japan Chapter Young Award)<
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, リフレクタンス画像とTrilateral filterを用いた距離画像の平滑化, 電気学会論文誌, Vol.132 ,No.2 , Sec.C, pp.291-298, 2012
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Denoising of Range Images using a Trilateral Filter and Belief Propagation, 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2011), pp.2020--2027, San Francisco, September 25-30, 2011.
- 近藤 直明, 大石 修士, 岩下 友美, 倉爪 亮, 3次元空間における物体の形状と見えを記述した特徴量の評価実験, 第32回日本ロボット学会学術講演会, 1J1-04, 2014.9.4
- 近藤 直明, 大石 修士, 岩下 友美, 倉 爪亮, レーザスキャナによる3 次元形状と見えに基づくセマンティックラベリング, 日本機械学会ロボティクスメカトロニクス講演会, 1P1-V05, 2014.5.26
- Naoaki Kondo, Shuji Oishi, Yumi Iwashita, Ryo Kurazume, Classification of Urban Area Using Laser Scanner, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-P-04 , Kyoto, 2012.10.31-11.1
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Texture Restoration Using Laser Attributes, Proc. The Ninth Joint Workshop on Machine Perception and Robotics (MPR13), K-P-03, Kyoto, 2012.10.31-11.1
- 大石 修士, 倉爪 亮, 岩下 友美, レーザ反射率に基づく3次元幾何モデルのテクスチャ欠損修復, 第31回日本ロボット学会学術講演会, 3I1-03, 2013.9.6
- 近藤 直明, 大石 修士, 岩下 友美, 倉爪 亮, 長谷川 勉, レーザスキャナを用いた距離と見えに基づく物体識別, 日本機械学会ロボティクスメカトロニクス講演会2013, 1P1-J02, 2013.5.22~25
- 大石修士,倉爪 亮,岩下友美,長谷川勉, 反射率画像を用いたVRモデルのカラー化と評価実験, 第18回ロボティクスシンポジア講演予稿集, 2D1, pp. 231-238, 2013.3.14-15, 2013
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, リフレクタンス画像に基づく3D モデルの彩色手法の開発, 第13回 計測自動制御学会システムインテグレーション部門講演会, 3F2-2, 2012.12.20
- Shuji Oishi, Yumi Iwashita, Ryo Kurazume, Color Mapping on 3D Model Using Laser Reflectivity, Proc. The Eighth Joint Workshop on Machine Perception and Robotics (MPR12), PS2-4, Fukuoka, 2012.10.16
- 大石 修士, 辻 徳生, 岩下 友美, 倉爪 亮, 長谷川 勉, レーザ反射強度を用いた3次元幾何モデルのカラリゼーション, 画像の認識理解シンポジウム (MIRU2012), IS3-75, 2012.8.8
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, リフレクタンス画像とカラー画像の類似性に基づく3次元幾何モデルのカラリゼーション, 日本機械学会ロボティクスメカトロニクス講演会2012, 1A2-A09, (2012.5.27~29)
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Surface Smoothing using a Trilateral filter, Proc. The Seventh Joint Workshop on Machine Perception and Robotics (MPR11), OS6-2,Beijing, 2011.10.14
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, レーザリフレクタンスを援用した3次元幾何モデルの彩色, 第29回日本ロボット学会学術講演会, 1O3-1, 2011.9.7
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, レーザ反射強度を用いた距離画像の平滑化, 画像の認識理解シンポジウム (MIRU2011), IS4-2, 2011
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, リフレクタンス画像を用いた距離画像の欠損修復, 日本機械学会ロボティクスメカトロニクス講演会, 2A1-L06, (2011.5.28)
- 大石 修士, 倉爪 亮, 岩下 友美, 長谷川 勉, Trilareral filterとBelief Propagationを用いた距離画像の平滑化及び欠損修復, 第16回ロボティクスシンポジア講演予稿集, pp.1-7, 2011.3.14
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, Smoothing Range Image using Reflectivity, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, PS1-10, 2010.10
- 大石修士, 倉爪亮, 岩下友美, 長谷川勉, リフレクタンス画像を用いた距離画像の平滑化フィルタの開発, 第28回日本ロボット学会学術講演会講演予稿集, 3I2-5, 2010.9
- Murguet Axel, 岩下友美, 倉爪亮, 距離画像とリフレクタンス画像を用いた移動体識別, 第28回日本ロボット学会学術講演会講演予稿集, 3I3-3, 2010.9
- Shuji Oishi, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Development of Denoising Techniques Using Reflectivity, ENSEEIHT- Kyushu University Workshop on Data Mining, and Media Processing (EKDM 2011), Toulouse, France, Nov. 24,25, 2011
距離データとレーザリフレクタンスを用いた6Dローカライゼーション
レーザスキャナーから得られる”距離”と”反射レーザ光の強度”を用いて,位置同定(Global localization)を行う手法を開発しています.
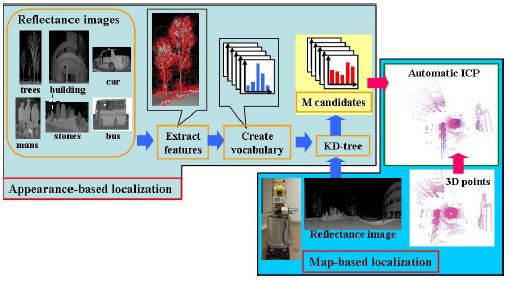 提案手法
提案手法 |
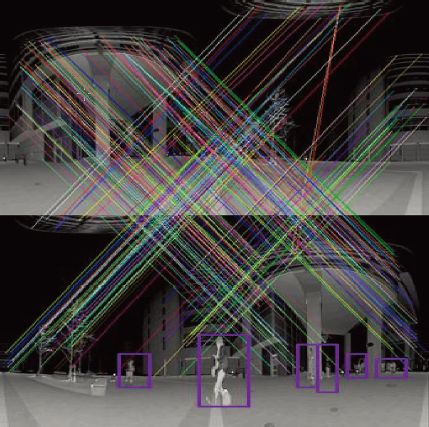 リフレクタンス画像の対応
リフレクタンス画像の対応 |
発表論文
- Dong Xiang ZHANG, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Robust global localization using laser reflectivity, Journal of Robotics and Mechatronics, vol.25, no.1, 2013
- Dong Xiang Zhang, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Robot localization under perceptual aliasing conditions based on laser reflectivity using particle filter, 2011 IEEE/SICE International Symposium on System Integration (SII2011), pp.--, Kyoto, 2011.12.20-22, 2011
- DongXiang Zhang, Ryo Kurazume, Yumi Iwashita, Tsutomu Hasegawa, Appearance and map-based global localization using laser reflectivity, 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.--, Phuket, 2011.12.7-11, 2011
- Dong Xiang Zhang, Ryo Kurazume, Yumi Iwashita, An effective method for robot positioning based on panoramic reflectance images, Proc. The Sixth Joint Workshop on Machine Perception and Robotics, PS1-9, 2010.10
- 倉爪 亮, 張 棟翔, 岩下 友美, 長谷川 勉, レーザリフレクタンス画像とBag-of-featuresを用いたレーザ搭載移動ロボットの3次元位置同定, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-E08, (2010.6)
レーザレンジファインダを用いた3次元実物体の幾何,光学モデリング
東京大学生産技術研究所の池内克史教授が進められているCREST池内プロジェクトに博士研究員として参加し,鎌倉大仏,奈良大仏を含む多くの文化遺産の幾何,光学モデリングを行いました.
| Textured image of Kamakura Great Buddha |
発表論文
- Katsushi Ikeuchi, Takeshi Oishi, Jun Takamatsu, Ryusuke Sagawa, Atsushi Nakazawa, Ryo Kurazume, No Nishino, Mawo Kamakura and Yasuhide Okamoto, The Great Buddha Project: Digitally Archiving, Restoring, and Analyzing Cultural Heritage Objects, International Journal of Computer Vision, Vol.75, No.1, pp.189-208, (2007.2)
- Ryo Kurazume, Ko Nishino, Mark D. Wheeler, Katsushi Ikeuchi, Mapping textures on 3D geometric model using reflectance image, Systems and Computers in Japan, Vol. 36, Issue 13, pp.92-101, (2005.11)
- 大石 岳史,佐川 立昌,中澤 篤志,倉爪 亮,池内 克史,分散メモリシステムにおける大規模距離画像の並列同時位置合わせ手法,情報処理学会論文誌,Vol.46, No.9, pp.2369-2378, (2005.9)
- 大石 岳史,増田 智仁,倉爪 亮,池内 克史,創建期奈良大仏及び大仏殿のデジタル復元,日本バーチャルリアリティ学会論文誌, Vol. 10 No. 3, pp.429-436, (2005.10)
- 長谷川 一英,廣田祐一郎,小川原 光一,倉爪 亮,池内 克史,気球搭載型レーザレンジセンサ,電子情報通信学会論文誌, Vol.J88-D-II, No.8, pp.1499-1507, (2005)
- Takeshi Oishi, Atsushi Nakazawa, Ryo Kurazume, and Katsushi Ikeuchi, Fast Simultaneous Alignment of Multiple Range Images Using Index Images, in Proc. The 5th International Conference on 3-D Digital Imaging and Modeling (3DIM), pp.476-483,2005.
- Yuichiro Hirota, Tomohito Masuda, Ryo Kurazume, Kohichi Ogawara, Kazuhide Hasegawa, Katsushi Ikeuchi, Flying Laser Range Finder and its data registration, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3155-3160, 2004.
- Yuichiro Hirota, Tomohito Masuda, Ryo Kurazume, Koichi Ogawara, Kazuhide Hasegawa, Katsushi Ikeuchi, Designing a laser range finder which is suspended beneath a balloon, Proc. of Sixth Asian Conference on Computer Vision (ACCV), 2004.
- Takeshi Oishi, Ryusuke Sagawa, Atsushi Nakazawa, Ryo Kurazume, Katsushi Ikeuchi, Parallel Alignment of a Large Number of Range Images, Proc. The 4th International Conference on 3D Digital Imaging and Modeling (3DIM 2003) , pp.195-202, 2003
- 佐川 立昌,西野 恒,倉爪 亮,池内 克史,大規模観測対象のための幾何形状および光学情報統合システム,情報処理学会CVIM論文誌, Vol.44, No.SIG5, pp.51-53,(2003).
- 池内 克史,倉爪 亮,西野 恒,佐川 立昌,大石 岳史,高瀬 裕,The Great Buddha Project,?大規模文化遺産のデジタルコンテンツ化?,日本バーチャルリアリティ学会論文誌, Vol.7, No.1, pp.103-113,(2002).
- 倉爪 亮,西野 恒,M.D.Wheeler,池内 克史,リフレクタンスエッジと濃淡エッジを用いたテクスチャのアラインメント,電子情報通信学会論文誌D-II,Vol.J85-D-II,No.6,pp.1038-1046,(2002).
- Ryusuke Sagawa, Takeshi Oishi, Atsushi Nakazawa, Ryo Kurazume, Katsushi Ikeuchi, Iterative Refinement of Range Images with Anisotropic Error Distribution,Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems, October 2002
- Ryo Kurazume, Ko Noshino, Zhengyou Zhang, and Katushi Ikeuchi, Simultaneous 2D images and 3D geometric model registration for texture mapping utilizing reflectance attribute, Proc. of Fifth Asian Conference on Computer Vision (ACCV), vol.1, pp.99-106, 2002.
- Katsushi Ikeuchi, Yutaka Takase, Ryo Kurazume, Takeshi Oishi, Ryusuke Sagawa, Ko Nishino, Modeling Cultural Heritage Through Observation, Int. Sympo. on Artificial Intelligence, Robotics and Human Centered Technology for Nuclear Applications, pp.26-32, 2002
- Ryo Kurazume, Mark D. Wheeler, and Katushi Ikeuchi, Mapping textures on 3D geometric model using reflectance image, Workshop for Data Fusion at IEEE Int. Conf. on Robotics and Automation, 2001.
- 倉爪, 西野,Z. Zhang,池内, レーザリフレクタンスとエピポーラ拘束を利用した複数テクスチャの同時アラインメント,画像の認識・理解シンポジウム (MIRU 2002),A2-3,(2002)
- 佐川,西野,倉爪,池内,大規模観測対象のための幾何形状および光学情報統合システム,画像の認識・理解シンポジウム (MIRU 2002),E1-2,(2002)
- 増田智仁,池水美都,西野嘉章,池内克史,倉爪亮 ,パラメタ同時推定位置合わせ手法の開発,画像の認識・理解シンポジウム (MIRU 2002),P1-3,(2002)
- 大石岳史,佐川立昌,中澤篤志,倉爪亮,池内克史,距離画像の誤差分布方向を考慮した反復計算による精度向上手法,画像の認識・理解シンポジウム (MIRU 2002),B5-3,(2002)/li>
- 倉爪,文化財のデジタル化, 計測自動学会第2回システムインテグレーション部門学術講演会(SI2001), (2001).
- 倉爪,大石,佐川,西野,池内,Great Buddha Project?観察に基づく文化遺産のデジタル保存?, 情報処理学会 人文科学とコンピュータシンポジウム(じんもんこん:-)2001), (2001).
- 倉爪,大石,佐川,西野,池内,Great Buddha Project?文化遺産のデジタル保存?,第19回日本ロボット学会学術講演会予稿集,pp.23-24, (2001).
- 倉爪,M.D.Wheeler,池内,リフレクタンスエッジと濃淡エッジを用いたテクスチャのアラインメント,コンピュータビジョンとイメージメディア研究報告(CVIM),2001-CVIM-126, pp.41-48,(2001).