Cooperative positioning system for multiple robots, CPS
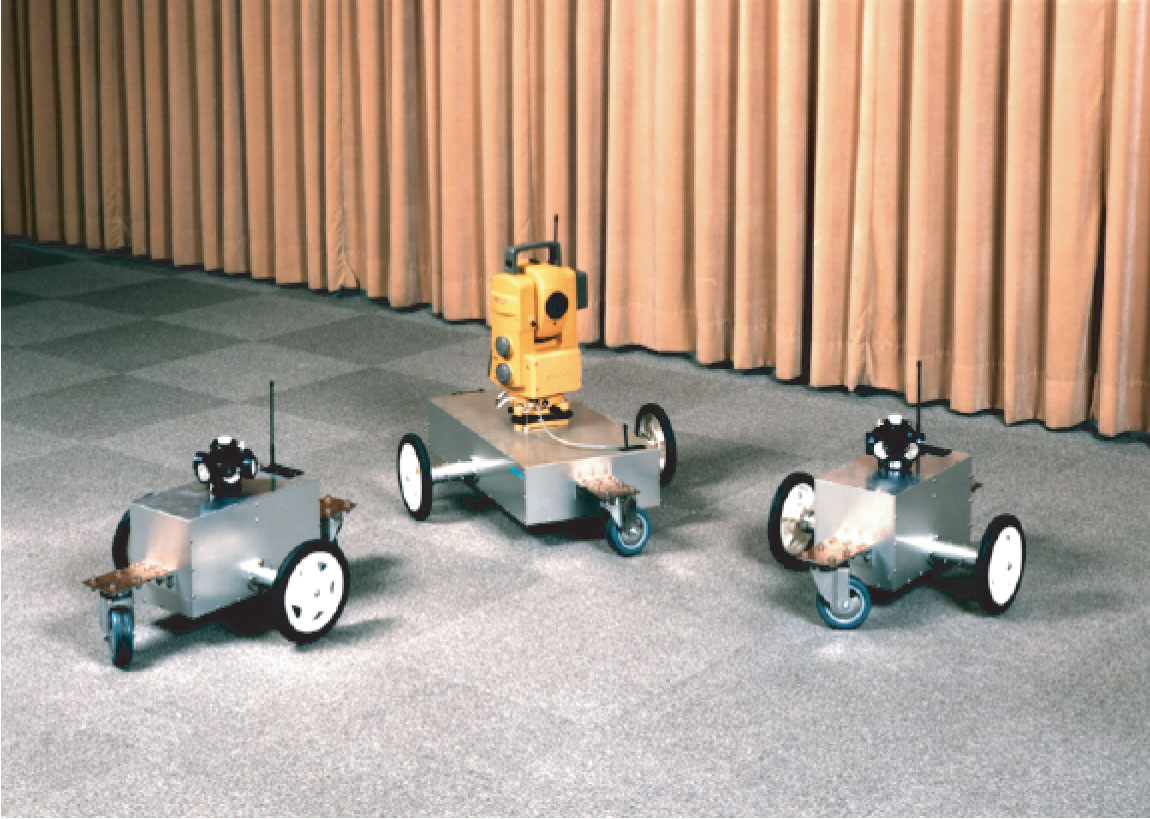
For autonomous mobile robots, high-precision positioning in unstructured and dynamically changing environments is essential. Dead reckoning is a widely used method; however, it suffers from accumulated errors caused by wheel slippage, making it unreliable for long-distance navigation—particularly on uneven terrain. Another common approach is the landmark method, which estimates the robot’s current position relative to known landmarks. This method, however, is limited by its dependency on prior environmental knowledge and cannot be applied in uncharted areas. The Global Positioning System (GPS) is effective for three-dimensional positioning in open outdoor environments but fails in areas where radio signals are obstructed, such as indoor or underground settings. To address these limitations, we propose a novel method called the Cooperative Positioning System (CPS). The core idea of CPS is to divide the robots into two groups—Group A and Group B. Group A remains stationary and serves as a landmark while Group B moves. After a certain distance, Group B halts and becomes a new landmark for Group A. This alternating process is repeated until the destination is reached. Compared to dead reckoning, CPS significantly reduces the accumulation of positioning errors and supports three-dimensional localization. Unlike the landmark method, CPS does not require pre-installed landmarks, making it applicable in unknown environments. We have developed and evaluated multiple CPS-based robotic platforms—CPS-I, CPS-II, and CPS-III—and demonstrated their effectiveness in practical tasks such as floor cleaning and environmental surveying in uncharted areas.
 CPS-I (1994)
CPS-I (1994) |
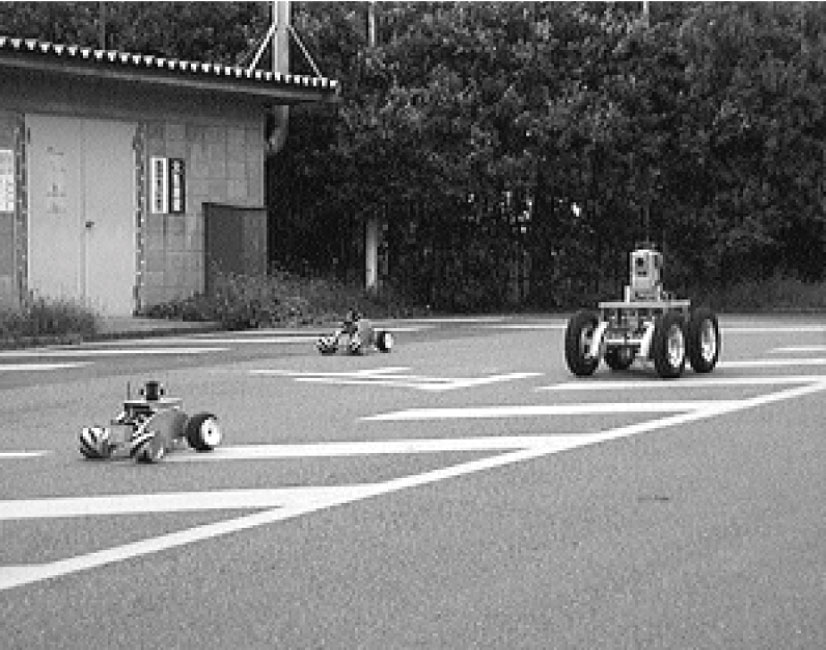
 CPS-II (1996)
CPS-II (1996) |
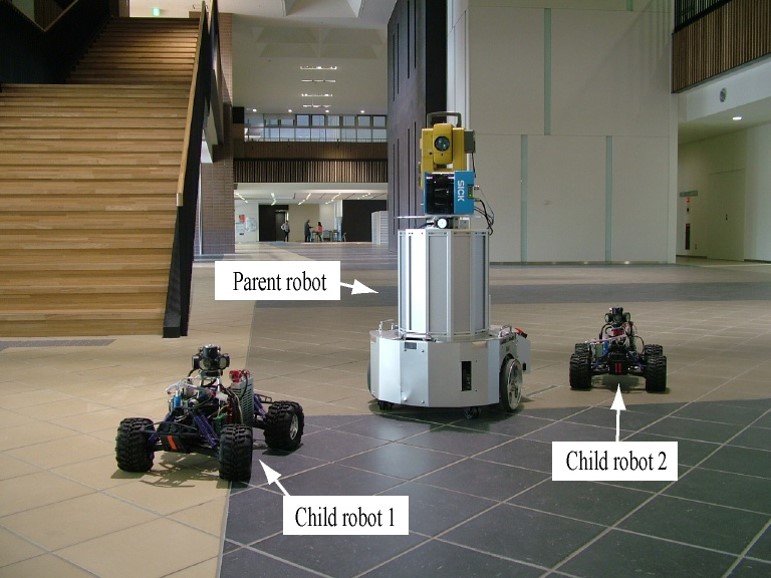
 CPS-III (1998)
CPS-III (1998) |
 CPS-IV (1998)
CPS-IV (1998) |
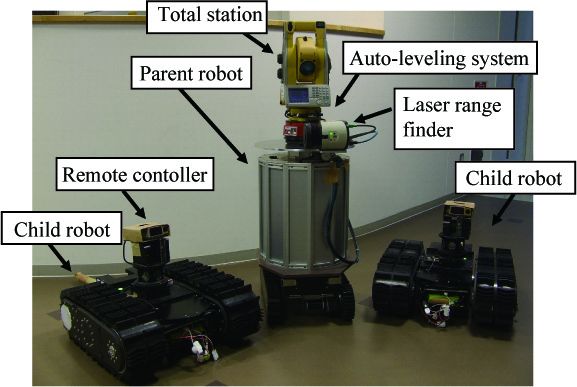
 CPS-V (2006)
CPS-V (2006) |
 CPS-VI (2011)
CPS-VI (2011) |
 CPS-VII (2015)
CPS-VII (2015) |
 CPS-VIII (2017)
CPS-VIII (2017) |
| CPS-I | CPS-II | CPS-III |
| CPS-IV | CPS-V rev.1 | CPS-V |
|
CPS-VI |
CPS-VII | CPS-VIII |
Papers
- Ryo Kurazume, Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Automatic large-scale three dimensional modeling using cooperative multiple robots, Computer Vision and Image Understanding, Vol.157, pp. 25-42, 2017, doi:10.1016/j.cviu.2016.05.008
- Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Ryo Kurazume, Automatic planning of laser measurements for a large-scale environment using CPS-SLAM system, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), Hamburg, Germany, Sep. 28-Oct. 2, 2015
- Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, ND voxel localization using large-scale 3D environmental map and RGB-D camera, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.538-545, Shenzhen, Dec. 12-14, 2013(Best Paper Award Finalist)
- Yongjin Jeong, Ryo Kurazume, Yoonseok Pyo, Yumi Iwashita, Tsutomu Hasegawa, High-Precision Three-Dimensional Laser Measurement System by Cooperative Multiple Mobile Robots, 2012 IEEE/SICE International Symposium on System Integration (SII2012), pp.198-205, Fukuoka, 2012.12.16-18, 2012
- Yukihiro Tobata, Ryo Kurazume, Yusuke Noda, Kai Lingemann, YumiIwashita, Tsutomu Hasegawa, Laser-based geometrical modeling of large-scale architectural structures using co-operative multiple robots, Autonomous Robot, Vol.32, No.1, pp. 49-62, (2012)
- R. Kurazume and S. Hirose, Development of a Cleaning Robot System with Cooperative Positioning System, Autonomous Robots, Vol. 9, No. 3, pp. 237-246, (2000).
- R. Kurazume and S. Hirose, An Experimental Study of a Cooperative Positioning System, Autonomous Robots, Vol. 8, No. 1, pp. 43-52, (2000).
- Yukihiro Tobata, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, Automatic laser-based geometrical modeling using multiple mobile robots, 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO 2010), pp.363-369, Tianjin, Dec. 14-18, 2010 (T.J.Tarn Best Paper in Robotics)
- Ryo Kurazume, Yusuke Noda, Yukihiro Tobata, Kai Lingemann, Yumi Iwashita, Tsutomu Hasegawa, Laser-based Geometric Modeling using Cooperative Multiple Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.3200-3205, May 12-17, 2009.
- Ryo Kurazume, Yukihiro Tobata, Yumi Iwashita, Tsutomu Hasegawa, 3D laser measurement system for large scale architectures using multiple mobile robots, The 6th International Conference on 3-D Digital Imaging and Modeling (3DIM2007), August 2007.
- R. Kurazume and S. Hirose, Study on Cooperative Positioning System - Optimum Moving Strategies for CPS-III -, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 4, pp. 2896-2903, 1998.
- R. Kurazume, S. Hirose, S. Nagata, and N. Sashida, Study on Cooperative Positioning System -Basic Principle and Measurement Experiment-, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 2, pp. 1421-1426, 1996.
- R. Kurazume, S. Nagata and S. Hirose, Cooperative Positioning with Multiple Robots, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 2, pp. 1250-1257, (1994).
- R. Kurazume, S. Nagata and S. Hirose, Cooperative Positioning with Multiple Robots, Proc. JSME 2nd Int. Conf. on Motion and Vibration Control, pp. 244-249, (1994).
- Ryo Kurazume, Shigeo Hirose, Study on Cooperative Positioning System - Optimum Moving Strategies for CPS-III -, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 2896-2903, 1998
- Ryo Kurazume, Shigeo Hirose, Shigemi Nagata, N. Sashida, Study on Cooperative Positioning System -Basic Principle and Measurement Experiment-, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1421-1426, 1996
- Ryo Kurazume, Shigemi Nagata, Shigeo Hirose, Cooperative Positioning with Multiple Robots, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1250-1257, 1994
- Yusuke Noda, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Laser-based Modeling of Cultural Heritage Using Cooperative Multiple Robots, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-4, (2009 10)
- Yukihiro Tobata, Ryo Kurazume, and Tsutomu Hasegawa, Study on CPS SLAM, Proc. The Third Joint Workshop on Machine Perception and Robotics, CD-ROM, (2007.11).(Best Poster Session Award)
Soccer robots for RoboCup
We are developing a robust localization technique for RoboCup Middle Size League robots using omni-directional cameras.
| Fusion |
|---|

|
Rescue robots
We are developing a rescue robot system composed of multiple cooperative robots.
| Rescue robot system | Stable step climbing |
Measured 3D model (Shibuya station) |
| Motion control in 3D space | Motion control in 3D space | Step climbing using "tail" |
Papers
- Ryuichi Hodoshima, Michele Guarnieri, Ryo Kurazume, Hiroshi Masuda, Takao Inoh, Paulo Debenest, Edwardo F. Fukushima and Shigeo Hirose, HELIOS Tracked Robot Team : Mobile RT System for Special Urban Search and Rescue Operations, Journal of Robotics and Mechatronics, Vol.23, No.6, pp.1041-1054, 2011
- Michele Guarnieri, Ryo Kurazume, Hiroshi Masuda, Takao Inoh, Kensuke TAKITA, Ryuichi Hodoshima, Paulo Debenest, Edwardo F. Fukushima, Shigeo Hirose, HELIOS System: A Team of Tracked Robots for Special Urban Search and Rescue Operations, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS09), pp.2795-2800, St. Louis, October 11-15, 2009
- Michele Guarnieri, Paulo Debenest, Takao Inoh, Kensuke Takita, Hiroshi Masuda, Ryo Kurazume, Edwardo F. Fukushima, Shigeo Hirose, HELIOS Carrier: Tail-like Mechanism and Control Algorithm for Stable Motion in Unknown Environments, in Proc. IEEE International Conference on Robotics and Automation, pp.1851-1856, May 12-17, 2009.
Autonomous mobile sensor terminal "Portable Go"
We are developing autonomous mobile sensor terminals called "Portable Go." These terminals are capable of navigating and operating in informationally unstructured environments and can guide other robots using their onboard laser range finders. This approach has the potential to revolutionize robot collaboration and interaction in complex, uncharted environments.
See "Service robots" page for more information.
| Multiple sensor terminal robots(Portable Go) | Deplayment of multiple robots |
| Portable Go | |
Papers
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals "Portable Go" for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.X, No.X, 2019, DOI:10.1186/s40648-019-0134-1