群ロボットによる協調ポジショニングステム(CPS)
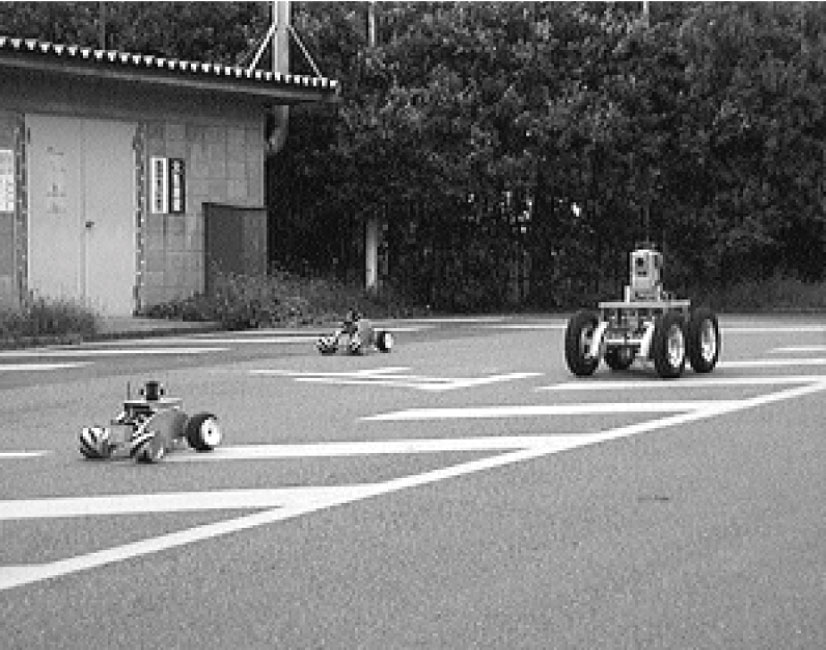
複数台のロボットを協調して移動,静止させることで,高精度な自己位置同定を行う「協調ポジショニング法,CPS」を提案し,様々な機械モデルを製作して実験しています.4号機を用いた屋外移動実験の結果,屋外不整地での位置同定誤差が0.3%以下(323m移動後の誤差0.97m)であることを確認しました.
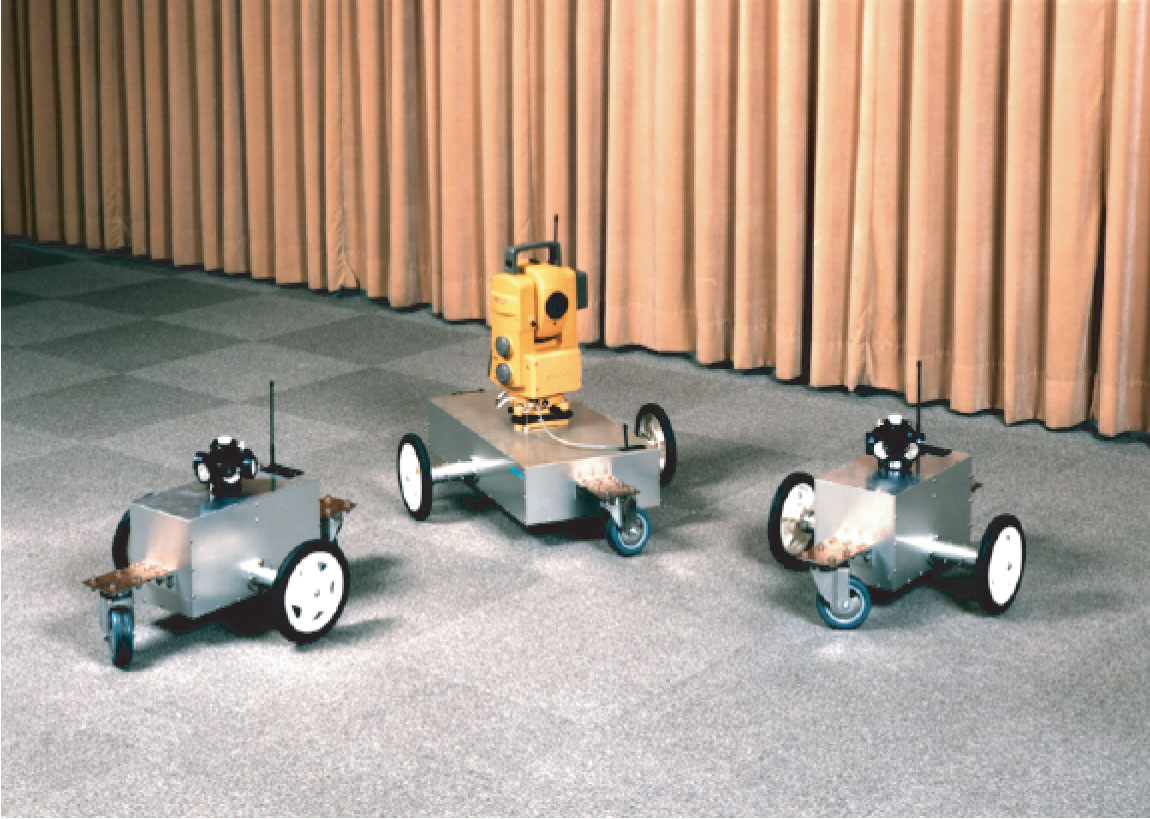
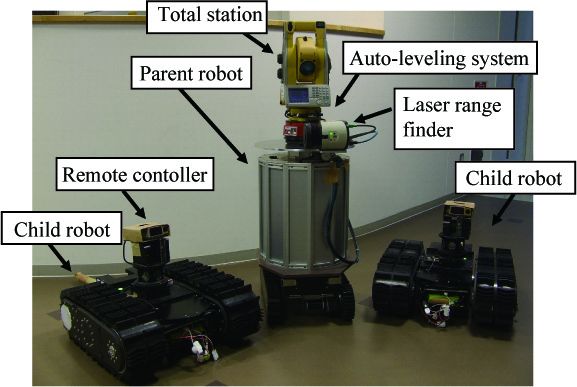
移動ロボットにとって,現在位置を正確に知ることは必要不可欠です.しかし従来の位置同定法は,屋外では同定精度が低下したり,未知環境では使えないなどの欠点がありました. そこで我々はこれまでに複数のロボットがお互いに位置を参照しながら移動することで, 車輪回転角度の計測など従来の手法では全く考えられない高い位置同定精度を実現する 「群ロボットによる協調ポジショニング法,Cooprative Positioning System(CPS)」を提案しています.下図は3台のロボットを使用したの一例です.これはロボット が相対角度や仰角を計測してロボットの三次元位置を測定し,その後,例えばロボット3を破線のように移動させ,ロボット 2と1の位置を測定するという動作を繰り返すことで,全てのロボットの位置を次々と同定しながら移動するものです. 本手法は,
- 人工的なランドマークが不要で,未知環境においても桁違いに高精度(0.3%以下)な位置同定が可能となる
- GPSが利用できないビル内部でも利用できる
- 障害物と接触しても同定精度には影響がない
など実用上著しく有効な特徴を有します.
 CPS-I (1994)
CPS-I (1994) |
 CPS-II (1996)
CPS-II (1996) |
 CPS-III (1998)
CPS-III (1998) |
 CPS-IV (1998)
CPS-IV (1998) |
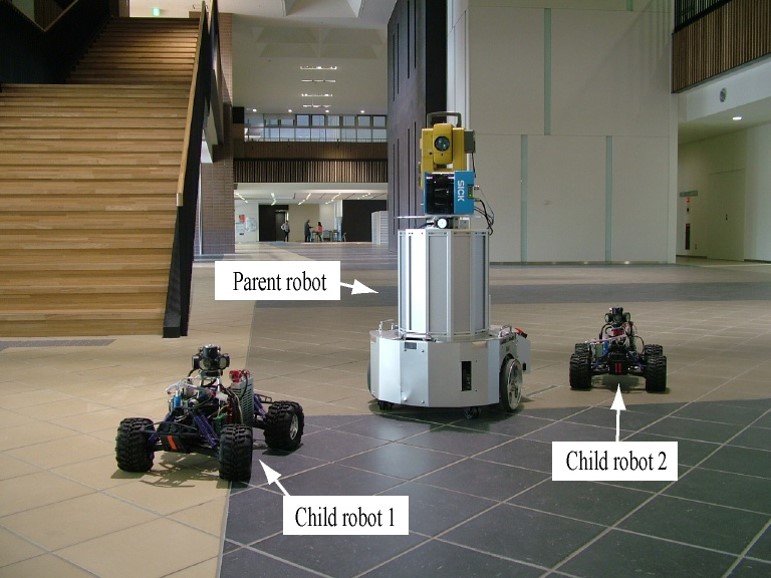 CPS-V (2006)
CPS-V (2006) |
 CPS-VI (2011)
CPS-VI (2011) |
 CPS-VII (2015)
CPS-VII (2015) |
 CPS-VIII (2017)
CPS-VIII (2017) |
| 1号機 | 2号機 | 3号機を用いた床面清掃実験 |
| 4号機を用いた長距離位置同定実験 | 5号機(試作機) | 5号機 |
|
6号機 |
7号機 | 8号機 |
発表論文
-
【学位論文】
- 協調ポジショニングシステムに関する研究 東京工業大学 平成10年度 【発表論文】
- Ryo Kurazume, Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Automatic large-scale three dimensional modeling using cooperative multiple robots, Computer Vision and Image Understanding, Vol.157, pp. 25-42, 2017, doi:10.1016/j.cviu.2016.05.008
- Souichiro Oshima, Shingo Nagakura, Yongjin Jeong, Yumi Iwashita, Ryo Kurazume, Automatic planning of laser measurements for a large-scale environment using CPS-SLAM system, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), Hamburg, Germany, Sep. 28-Oct. 2, 2015
- 大島 漱一郎, 永倉 翔吾, 鄭 龍振, 岩下 友美, 倉爪 亮, CPS-SLAM による大規模環境のレーザ観測の自動計画手法, 日本ロボット学会誌, Vol.33, No.4, pp.263-274, 2015
- Shuji Oishi, Yongjin Jeong, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, ND voxel localization using large-scale 3D environmental map and RGB-D camera, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp.538-545, Shenzhen, Dec. 12-14, 2013(Best Paper Award Finalist)
- Yongjin Jeong, Ryo Kurazume, Yoonseok Pyo, Yumi Iwashita, Tsutomu Hasegawa, High-Precision Three-Dimensional Laser Measurement System by Cooperative Multiple Mobile Robots, 2012 IEEE/SICE International Symposium on System Integration (SII2012), pp.198-205, Fukuoka, 2012.12.16-18, 2012
- 鄭 龍振, 岩下 友美, 倉爪 亮, CPS-SLAMの研究 -計測精度の向上とトンネル出来形計測システムの構築-, 日本ロボット学会誌, Vol.30, No.1, pp.180-187, 2012
- Yukihiro Tobata, Ryo Kurazume, Yusuke Noda, Kai Lingemann, YumiIwashita, Tsutomu Hasegawa, Laser-based geometrical modeling of large-scale architectural structures using co-operative multiple robots, Autonomous Robot, Vol.32, No.1, pp. 49-62, (2012)
- 鄭 龍振, 岩下 友美, 倉爪 亮, CPS-SLAMの研究 -計測精度の向上とトンネル出来形計測システムの構築-, 日本ロボット学会誌, Vol.30, No.1, pp.--, 2012 to appear
- 横矢 剛, 長谷川 勉, 倉爪 亮, 村上 剛司, 群ロボットによる未知環境3次元地図の自動作成のための動作計画手法, 電子情報通信学会誌, Vol.J93-D, No.6, pp.1024-1035, (2010.6)
- 倉爪 亮, 戸畑 享大, 村上 剛司, 長谷川 勉, CPS-SLAMの研究-大規模建造物の高精度3次元幾何形状レーザ計測システム-, 日本ロボット学会誌, Vol.25, No.8, pp.1234-1242, (2007.11)
- R. Kurazume and S. Hirose, Development of a Cleaning Robot System with Cooperative Positioning System, Autonomous Robots, Vol. 9, No. 3, pp. 237-246, (2000).
- R. Kurazume and S. Hirose, An Experimental Study of a Cooperative Positioning System, Autonomous Robots, Vol. 8, No. 1, pp. 43-52, (2000).
- 倉爪,広瀬,岩崎,長田,協調ポジショニングシステムの研究 -CPSアクティブタッチ融合型地図生成法-, 日本ロボット学会誌, Vol.17, No.1, pp.84-90, (1999).
- 倉爪,広瀬,岩崎,長田,指田,協調ポジショニングシステムの研究 -CPS-IIIを用いた自動清掃ロボットシステムの開発-, 日本ロボット学会誌, Vol.16, No.7, pp.934-941, (1998).
- 倉爪,広瀬,岩崎,長田,指田,協調ポジショニングシステムの研究 -CPS-II型システムの最適化移動形態-, 日本ロボット学会誌, Vol.15, No.5, pp.773-780, (1997).
- 倉爪,広瀬,岩崎,長田,指田,協調ポジショニングシステムの研究-冗長位置情報の融合と機械モデル実験-, 日本ロボット学会誌, Vol.14, No.8, pp.1229-1236 (1996)
- 広瀬,倉爪,長田,群ロボットによる協調ポジショニング法, 日本ロボット学会誌, Vol.13, No.6, pp.838-845, (1995).
- Yukihiro Tobata, Ryo Kurazume, Yumi Iwashita and Tsutomu Hasegawa, Automatic laser-based geometrical modeling using multiple mobile robots, 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO 2010), pp.363-369, Tianjin, Dec. 14-18, 2010 (T.J.Tarn Best Paper in Robotics)
- Ryo Kurazume, Yusuke Noda, Yukihiro Tobata, Kai Lingemann, Yumi Iwashita, Tsutomu Hasegawa, Laser-based Geometric Modeling using Cooperative Multiple Mobile Robots, in Proc. IEEE International Conference on Robotics and Automation, pp.3200-3205, May 12-17, 2009.
- Ryo Kurazume, Yukihiro Tobata, Yumi Iwashita, Tsutomu Hasegawa, 3D laser measurement system for large scale architectures using multiple mobile robots, The 6th International Conference on 3-D Digital Imaging and Modeling (3DIM2007), August 2007.
- R. Kurazume and S. Hirose, Study on Cooperative Positioning System - Optimum Moving Strategies for CPS-III -, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 4, pp. 2896-2903, 1998.
- R. Kurazume, S. Hirose, S. Nagata, and N. Sashida, Study on Cooperative Positioning System -Basic Principle and Measurement Experiment-, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 2, pp. 1421-1426, 1996.
- R. Kurazume, S. Nagata and S. Hirose, Cooperative Positioning with Multiple Robots, Proc. IEEE Int. Conf. on Robotics and Automation, Vol. 2, pp. 1250-1257, (1994).
- R. Kurazume, S. Nagata and S. Hirose, Cooperative Positioning with Multiple Robots, Proc. JSME 2nd Int. Conf. on Motion and Vibration Control, pp. 244-249, (1994).
- Ryo Kurazume, Shigeo Hirose, Study on Cooperative Positioning System - Optimum Moving Strategies for CPS-III -, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 2896-2903, 1998
- Ryo Kurazume, Shigeo Hirose, Shigemi Nagata, N. Sashida, Study on Cooperative Positioning System -Basic Principle and Measurement Experiment-, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1421-1426, 1996
- Ryo Kurazume, Shigemi Nagata, Shigeo Hirose, Cooperative Positioning with Multiple Robots, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1250-1257, 1994
- 小山 翔平, 岩下 友美, 倉爪 亮, クワッドコプタ搭載LRFと単眼カメラによるBaySACを用いた地表面計測, 第15回計測自動制御学会システムインテグレーション部門講演会 SI2014, 1M2-2, 2014.12.15-17
- 大島 漱一郎, 鄭 龍振, 岩下 友美, 倉爪 亮, 高精度レーザスキャナとクワッドコプタを用いたレーザ計測群ロボットシステムの開発, 第32回日本ロボット学会学術講演会, 1J3-03, 2014.9.4
- 大島 漱一郎, 永倉 翔吾, 岩下 友美, 倉爪 亮, 群ロボットによる大規模環境のレーザ観測の自動計画, 第14回建設ロボットシンポジウム, 2014.8.28
- 永倉 翔吾, 倉爪 亮,岩下 友美, 長谷川 勉, 群ロボットによる3次元環境地図自動構築システムの開発 位置同定誤差の蓄積を低減する観測戦略, 日本機械学会ロボティクスメカトロニクス講演会2013, 1A2-H04, 2013.5.22~25
- 永倉翔吾, 倉爪亮, 岩下友美, 長谷川勉, ロボットの環境計測作業の自動計画手法, 第30回日本ロボット学会学術講演会, 1B2-3, 2012.9.17
- 鄭 龍振, 岩下 友美, 倉爪 亮, 長谷川 勉, ロボット群による大規模実環境の高精度レーザ計測, コンピュータビジョンとイメージメディア(CVIM), Vol.2012-CVIM-180, No.28, 2012,1,19
- 鄭 龍振, 倉爪 亮, 岩下 友美, 長谷川 勉, 群ロボットによる大規模構造物レーザ計測システム, 第29回日本ロボット学会学術講演会, 1O3-2, 2011.9.7
- 鄭 龍振, 倉爪 亮, 岩下 友美, 長谷川 勉, 自動化された協調ポジショニングシステムによる3次元環境地図の自動生成, 第11回計測自動制御学会システムインテグレーション部門講演会, 1I3-4, 2010.12.23.
- 野田裕介, 倉爪亮, 岩下友美, 長谷川勉, カラー画像の分割領域を用いた2D/3D位置合わせ, 画像の認識理解シンポジウム (MIRU2010), IS2-11, 2010.7
- Yusuke Noda, Ryo Kurazume, Yumi Iwashita, and Tsutomu Hasegawa, Laser-based Modeling of Cultural Heritage Using Cooperative Multiple Robots, Proc. 5th Joint Workshop on Machine Perception and Robotics (MPR2009), MPR2009-ps2-4, (2009 10)
- 野田裕介, 倉爪亮, 岩下友美, 長谷川勉, レーザ・カメラ搭載群ロボットによる太宰府天満宮の幾何光学計測, 画像の認識理解シンポジウム (MIRU2009), IS3-34, 2009.7
- 野田 裕介, 倉爪 亮, 岩下 友美, 長谷川 勉, 移動ロボット群を用いた大規模文化遺産の幾何・光学モデリング, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-E06, (2009.5)
- 野田 裕介, 倉爪 亮, 岩下 友美, 長谷川 勉, 移動ロボット群を用いた大規模文化遺産のデジタルアーカイブ, 第14回ロボティクスシンポジア, 3C3, 2009.3.16
- 戸畑 享大, 倉爪 亮, 村上 剛司, 長谷川 勉, 移動ロボット群による大規模建造物の3次元レーザ計測システムの開発, 第13回ロボティクスシンポジア講演会予稿集, (2008.3).
- 戸畑 享大,倉爪 亮,山田 弘幸,村上 剛司,長谷川 勉,CPS SLAM の研究 第2報 CPS とレーザ計測による屋内3次元地図の自動構築実験,日本機械学会ロボティクスメカトロニクス講演会, 2P1-G04, (2007.5)
- 倉爪 亮, 戸畑 享大, 岩下 友美, 村上 剛司, 長谷川 勉, 群移動ロボットによる広域3次元レーザ計測システムの開発, 三次元映像のフォーラム, (2008.3)
- 倉爪 亮, 戸畑 享大, 村上 剛司, 長谷川 勉, 群ロボットによるCPS-SLAMと大規模構造物の幾何モデリング, 社)精密工学会画像応用技術専門委員会講演予稿集, (2008.1)
- Yukihiro Tobata, Ryo Kurazume, and Tsutomu Hasegawa, Study on CPS SLAM, Proc. The Third Joint Workshop on Machine Perception and Robotics, CD-ROM, (2007.11).(Best Poster Session Award)
- 戸畑 享大, 倉爪 亮, 村上 剛司, 長谷川勉, 群ロボットを用いた大規模3次元環境計測システム, 第25回日本ロボット学会学術講演会講演予稿集, (2007.9)
- 戸畑 享大,倉爪 亮,村上 剛司,長谷川 勉,移動ロボット群による大規模建造物の3次元レーザ計測システムの開発,画像の認識理解シンポジウム (MIRU2007), OS-A9-01, (2007 7)
- 戸畑 享大,倉爪 亮,村上 剛司,長谷川 勉,CPS SLAMの研究 -CPS-Vの構築とSLAM実験-,第24回日本ロボット学会学術講演会講演予稿集,,1E14,(2006.9)
- 横矢 剛,長谷川 勉,倉爪 亮,村上 剛司, ロボットタウンの実証的研究 -広域分散カメラのロボットによる自動キャリブレーション-,第24回日本ロボット学会学術講演会講演予稿集,,2N14,(2006.9)
- 倉爪,広瀬, 協調ポジショニングシステムの研究 -第8報:CPS-IIIによる長距離移動測定実験- 第16回日本ロボット学会学術講演会予稿集, pp.169-170, (1998).
- 倉爪,広瀬, 協調ポジショニングシステムの研究 ?第7報:CPSアクティブタッチ融合型地図生成法? 日本機械学会ロボティクス・メカトロニクス講演会'98講演論文集, , 2CI1-4, (1998).
- 倉爪,岩崎,広瀬, 群ロボットによる協調ポジショニングシステム?第6報: CPS-IIIを用いた自動清掃ロボットシステムの開発, 第15回日本ロボット学会学術講演会予稿集, pp.209-210, (1997).
- 倉爪,岩崎,広瀬, 群ロボットによる協調ポジショニングシステム?第5報: 第三次機械モデルCPS-IIIの構築, 第15回日本ロボット学会学術講演会予稿集, pp.207-208, (1997).
- 倉爪,広瀬, 協調ポジショニングシステムの研究(CPS-II型システムの最適化移動形態), 日本機械学会第74期通常総会講演会講演論文集, Vol.IV, pp.???-???, (1997).
- 倉爪,広瀬,長田,指田, 協調ポジショニングシステムの研究 -第4報:第2次機械モデルCPS-IIの最適移動形態- 第14回日本ロボット学会学術講演会予稿集, pp.607-608, (1996).
- 倉爪,広瀬, 協調ポジショニングシステムの研究-冗長位置情報の融合-, 日本機械学会ロボティクス・メカトロニクス講演会'96講演論文集, Vol.B, pp.943-946, (1996).
- 倉爪,広瀬, ロボットシステムの微分特性評価に関する基本的考察 第13回日本ロボット学会学術講演会予稿集, pp.35-36, (1995).
- 指田,長田,広瀬,倉爪, 群ロボットによる協調ポジショニングシステム 第3報: 第2次移動ロボットシステムの構築と測定実験, 第13回日本ロボット学会学術講演会予稿集, pp.849-850, (1995).
- 広瀬,長田,倉爪,群ロボットによる協調ポジショニングシステム 第2報:複数位置情報の融合, 第12回日本ロボット学会学術講演会予稿集, pp.301-302, (1994).
- 広瀬,倉爪,長田, 群ロボットによる協調ポジショニング法, 第3回ロボットシンポジウム予稿集,pp. 37-42, (1993).
- 広瀬,長田,倉爪,群ロボットによる協調ポジショニング法, 第10回日本ロボット学会学術講演会予稿集, pp.1135-1138, (1992).
RoboCup用サッカーロボット
RoboCup中型機リーグで用いられるサッカーロボットに対して,ノイズにロバストな位置同定手法を開発しています.
| Fusion |
|---|

|
発表論文
- 本村 暁,松岡 毅,長谷川 勉,倉爪 亮,2つのランドマーク方位計測とデッドレコニングに基づく実時間自己位置同定法,日本ロボット学会誌, Vol.23, No.3, pp.311-320, (2005)
- 倉爪,本村,山口,松岡,山本,長谷川,全方位カメラとデッドレコニング機能を有するサッカーロボットのロバストな自己位置同定手法,日本ロボット学会誌, Vol.22, No.3, pp.343-352, (2004)
- 倉爪,長谷川,全方位カメラとデッドレコニング機能を有するサッカーロボットのロバストな自己位置同定手法 メディアンフィルタによる誤観測情報の除去と非線形最尤推定法の適用,第20回日本ロボット学会学術講演会予稿集,3A21, (2002).
- 倉爪,長谷川,全方位カメラとデッドレコニング機能を有するサッカーロボットのロバストな自己位置同定手法 LMedS法を用いたランドマークの対応付け,第20回日本ロボット学会学術講演会予稿集,3A22, (2002).
被災建物内レスキュー群ロボット
被災建物内で要救助者を捜索するレスキューロボット群を開発しています.
| 被災建物内レスキュー群ロボット | レスキュー作業の様子 | 東急渋谷駅 |
| 仮想化3次元モデル内での操縦 | 仮想化3次元モデル内での操縦 | 尻尾を使った階段走行 |
発表論文
- Ryuichi Hodoshima, Michele Guarnieri, Ryo Kurazume, Hiroshi Masuda, Takao Inoh, Paulo Debenest, Edwardo F. Fukushima and Shigeo Hirose, HELIOS Tracked Robot Team : Mobile RT System for Special Urban Search and Rescue Operations, Journal of Robotics and Mechatronics, Vol.23, No.6, pp.1041-1054, 2011
- Michele Guarnieri, Ryo Kurazume, Hiroshi Masuda, Takao Inoh, Kensuke TAKITA, Ryuichi Hodoshima, Paulo Debenest, Edwardo F. Fukushima, Shigeo Hirose, HELIOS System: A Team of Tracked Robots for Special Urban Search and Rescue Operations, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS09), pp.2795-2800, St. Louis, October 11-15, 2009
- Michele Guarnieri, Paulo Debenest, Takao Inoh, Kensuke Takita, Hiroshi Masuda, Ryo Kurazume, Edwardo F. Fukushima, Shigeo Hirose, HELIOS Carrier: Tail-like Mechanism and Control Algorithm for Stable Motion in Unknown Environments, in Proc. IEEE International Conference on Robotics and Automation, pp.1851-1856, May 12-17, 2009.
自律移動型センサーターミナル”ポータブルGO”
何もセンサが置かれていない非情報構造化環境を,レーザを搭載した自律移動ロボット群”ポータブルGO”が自動で展開し, 他のロボットを誘導するシステムを開発しています.
| 移動型小型センサーターミナル(Portable Go) | 移動型小型センサーターミナルの展開 |
| Portable Go | |
発表論文
- Yuuta Watanabe, Akio Shigekane, Kohei Matsumoto, Akihiro Kawamura, Ryo Kurazume, Development of mobile sensor terminals "Portable Go" for navigation in informationally structured and unstructured environments, ROBOMECH Journal, Vol.X, No.X, 2019, DOI:10.1186/s40648-019-0134-1
- 渡邊 裕太, 重兼 聡夫, 河村 晃宏, 倉爪 亮, 情報構造化空間を拡張する群ロボットシステムの開発, 第34回日本ロボット学会学術講演会, pp.1A1-06, 2016.9.7