4足歩行ロボットの安定動歩行
2足歩行ロボットの代表的な動歩行である「トロット歩容」に対して,歩行中に胴体を前後左右に加減速させて,姿勢を安定化する「3D揺動歩容」を提案しています.また,遊脚復帰時に遊脚を上下,左右に振ることで,外乱に対しても姿勢を安定に保つ遊脚自由度を利用した姿勢安定化フィードバック制御法を開発しました.また4脚歩行ロボットの全方向移動アルゴリズムを開発し,安定余裕最大化間歇トロット歩容により全方向安定歩行を実現しました.
| 遊脚自由度の利用 | 姿勢安定化実験 | 安定余裕最大化間歇トロット歩容 |
発表論文
- R. Kurazume, K. Yoneda, and S. Hirose, Feedforward and feedback dynamic trot gait control for quadruped walking vehicle, Autonomous Robots, Vol. 12, No. 2, pp.157-172, 2002.
- 倉爪,米田,広瀬,4足歩行機械の3D揺動歩容,日本ロボット学会誌, Vol.19, No.5, pp.632-637, (2001).
- 倉爪,葉石,米田,広瀬,4足歩行機械の動歩行時の姿勢安定化制御,日本ロボット学会誌, Vol.19, No.3. pp.380-386, (2001).
- 倉爪,広瀬,高速画像安定化機構を用いた歩行機械の遠隔操縦性能向上に関する研究,日本ロボット学会誌, Vol.18, No.7, pp.109-116, (2000)./li>
- R. Kurazume, K. Yoneda, and S. Hirose, Feedforward and feedback dynamic trot gait control for a quadruped walking vehicle, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3172-3180, 2001.
- R. Kurazume and S. Hirose, Development of image stabilization system for a remote operation of walking robots, Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1856-1861, 2000.
- 藤春 征治, 倉爪 亮, 長谷川 勉, 結合型4脚歩行ロボットによる安定荒地歩行, 日本機械学会ロボティクスメカトロニクス講演会, 1P2-S-025 , (2005 6)
- 倉爪,米田,広瀬, 四足歩行機械の拡張左右揺動歩容, 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集, , 2P2-84-124, (2000).
- 倉爪,広瀬, 視覚支援歩行ロボットの研究 -第5報:本体揺動と基本行列による単眼歩行ロボットの奥行き知覚-, 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集, , 2P2-46-063, (2000).
- 倉爪,葉石,広瀬, 視覚支援歩行ロボットの研究 -第4報:高速画像安定化機構を用いた遠隔操縦性能の向上-, 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集, , 2P1-46-075, (2000).
- 倉爪,広瀬, 視覚支援歩行ロボットの研究 -第3報:高速画像安定化機構の開発-, 第17回日本ロボット学会学術講演会予稿集, pp.135-136, (1999).
- 倉爪,広瀬, 視覚支援歩行ロボットの研究 -第2報:本体揺動を利用した奥行き知覚-, 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集, , 1P1-42-061, (1999).
- 高松,倉爪,広瀬, 視覚支援歩行ロボットの研究 -第1報:歩行時画像の安定化と姿勢制御-, 日本機械学会ロボティクス・メカトロニクス講演会'99講演論文集, , 1P1-42-059, (1999).
2足,4足歩行ロボットの消費エネルギー規範型歩容生成手法
2足,4足歩行ロボットに対し,歩行中に消費するエネルギーを実験的,理論的に調べ,エネルギー効率の最も高い歩容を自動選択する手法を開発しています.
発表論文
- R. Kurazume, A. Byong-won, K. Ohta, T. Hasegawa, Experimental Study on Energy Efficiency for Quadruped Walking Vehicles, Proc. 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.613-618, November 2003
- 森 敬充, 倉爪 亮, 長谷川 勉,エネルギー効率の高い2足歩行機械の3D揺動歩容, 日本機械学会ロボティクスメカトロニクス講演会, 2P1-B17, (2006 5)
- 大田,安, 倉爪,長谷川,4足歩行ロボットのエネルギー効率向上に関する研究,日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2A1-1F-A5, (2003).
2足歩行ロボットの安定動歩行
2足歩行ロボットの動歩行に,4足歩行ロボットで開発した「3D揺動歩容」を適用し,収束計算によりモデル化誤差を補償した新たな軌道生成法を開発しました.また富士通製ヒューマノイドロボットHOAP-1を用いた歩行実験により,安定な動歩行が可能であることを確認しました.
| 安定動歩行実験 | ダンスステップ | ジョイスティックによる全方向歩容 |
| 段差乗り越え | 段差乗り越え | 静動融合歩容によるダンスステップ |
発表論文
- 倉爪,米田,田中,玉木,太田,長谷川,2足歩行機械の3D揺動歩容,日本ロボット学会誌,Vol.21, No.7, pp.811-818,(2003)
- 米田,玉木,太田,倉爪,2足歩行ロボットの省自由度構成, 日本ロボット学会誌, Vol.21, No.6, pp.546-553,(2003).
- R. Kurazume, T. Hasegawa, K. Yoneda, The Sway Compensation Trajectory for a Biped Robot, Proc. IEEE Int. Conf. on Robotics and Automation, pp.925-931,2003
- 田中,倉爪,長谷川,米田,玉木,2足歩行機械の3D 揺動歩容,日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2A1-1F-F5, (2003).
2足歩行ロボットの膝関節伸展歩容
ヒューマノイドロボットが人間環境で共存していくために,ロボットはユーザーに違和感を与えないよう人間らしく自然に振舞うことが重要です.しかし,現在の2足ヒューマノイドロボットの動作は不自然で,例えば多くの2足ロボットは腰の位置を低く一定に保ち,膝を曲げた状態で歩行しています.これはロボットの膝関節が伸び,自由度が縮退してしまうと,Zero Moment Point(ZMP)制御が困難になるためです.一方,人間は上体の上下運動,腰,膝そして足首の関節をうまく使い,常に十分な自由度を保ちながら歩行しています.さらに膝を伸ばすことによって,体重を支えるためのトルクが少なくてすむため,エネルギー効率も高いことが知られています.そこで,我々は膝関節を利用した歩容の評価指標としてKneeStretch Index (KSI) とKnee Torque Index(KTI) を提案し,歩行中の腰関節の上下動によりそれらを最小化にすることで,自然かつエネルギー効率の高い安定歩行を実現する,膝関節伸展歩容を提案しました.
| 膝関節伸展歩容 | 膝関節伸展歩容 |
発表論文
- Ryo Kurazume, Shuntaro Tanaka, Masahiro Yamashita, Tsutomu Hasegawa, Straight Legged Walking of a Biped Robot, Proc. 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2005
- 山下 将弘, 倉爪 亮, 米田 完, 長谷川 勉, 2足歩行機械の膝関節伸展歩容 --Knee Torque Indexの最適化--, 第23回日本ロボット学会学術講演会講演予稿集, 1G22, (2005 9)
- 山下 将弘, 倉爪 亮, 米田 完, 長谷川 勉, 2足歩行ロボットの膝関節伸展歩容, 日本機械学会ロボティクスメカトロニクス講演会, 1A1-S-042, (2005 6)
プロアクティブ・ヒューマンインターフェースの研究
実体を有する次世代型ヒューマンインターフェースとして,「プロアクティブ・ヒューマンインターフェース」の研究開発を行っています.
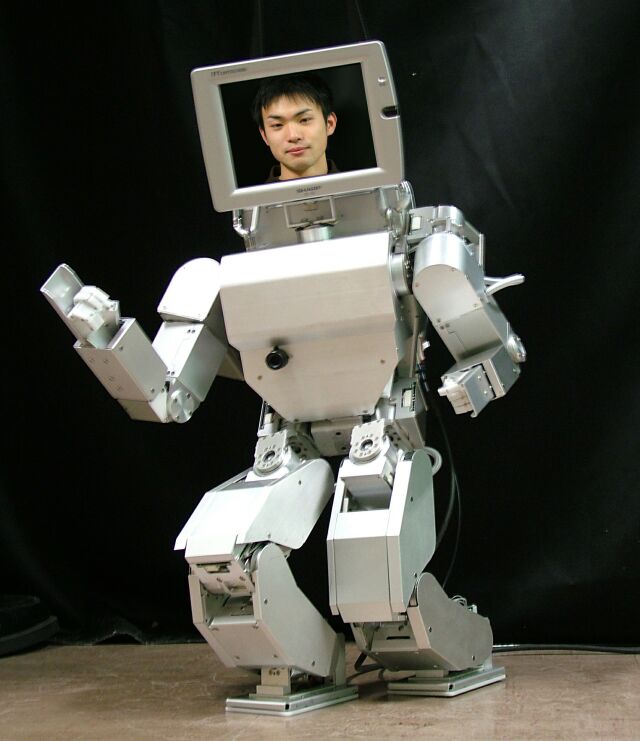 PICO |
PICO-2 |
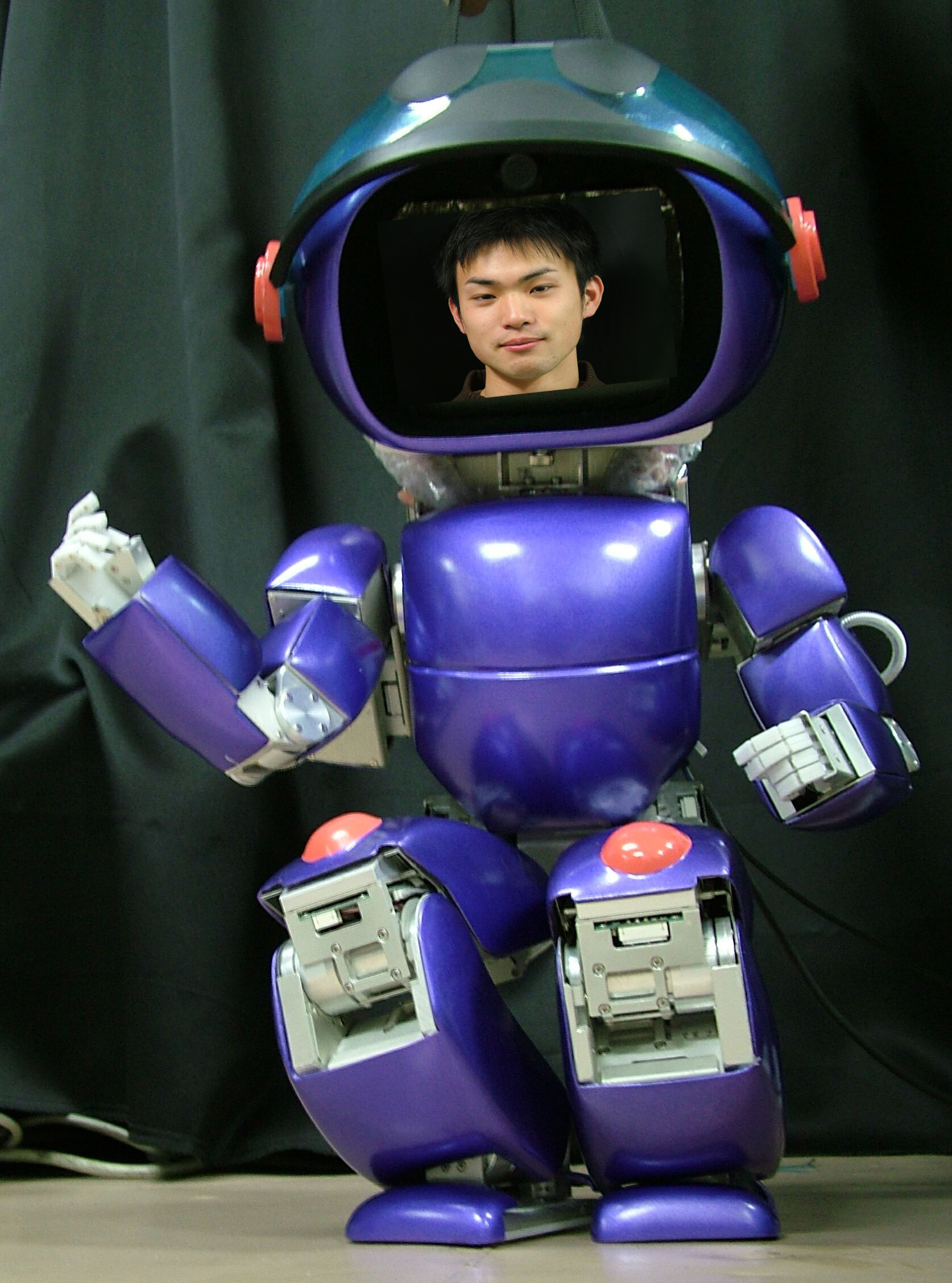 PICO-2 |
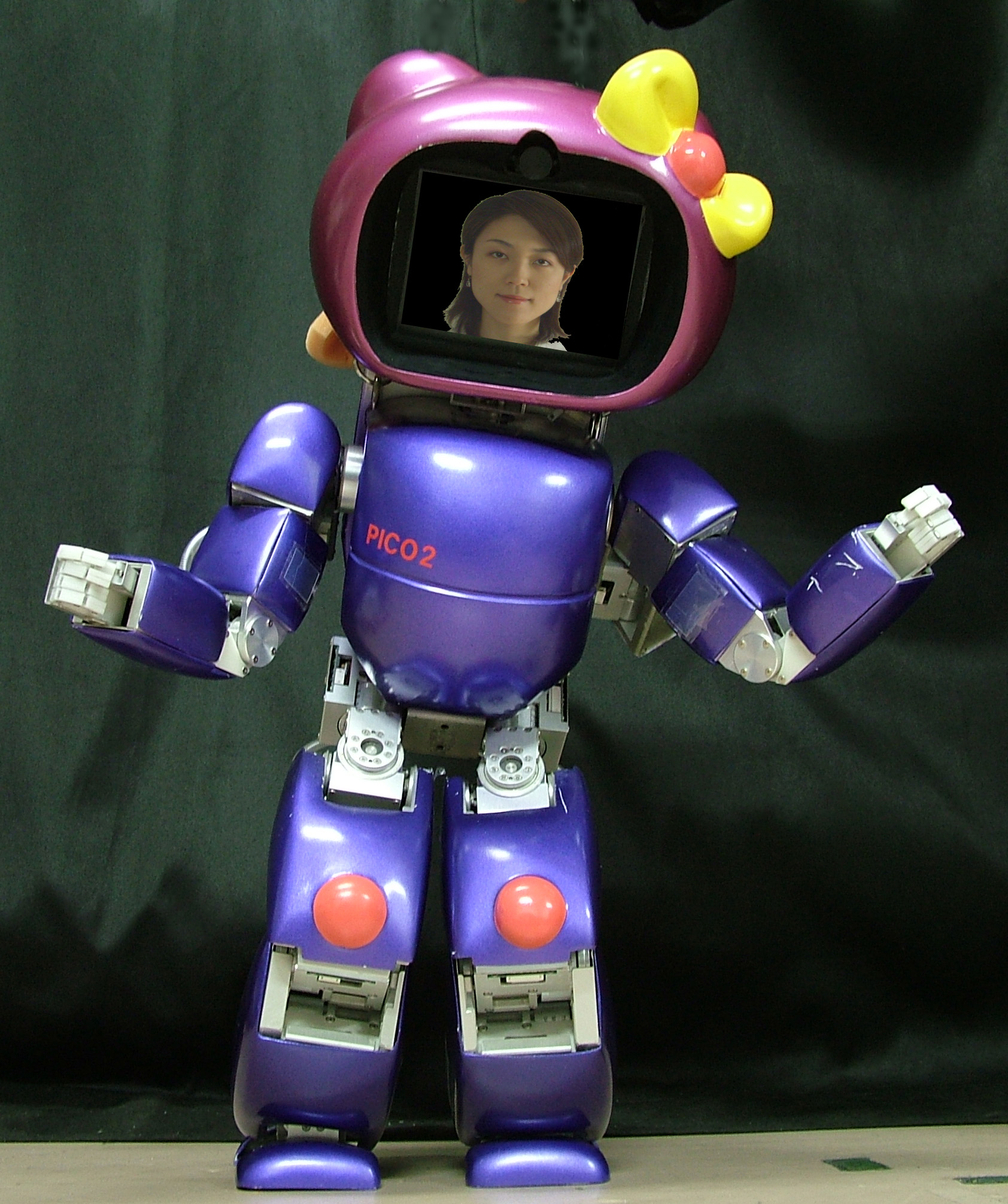 PICO-2K |
| 動作の再現 | ZMPバランス制御 | 動作の再現 | 方向転換 |
| 単眼カメラによる動作計測 | 筑紫キャンパス,箱崎キャンパス間での遠隔コミュニケーション実験 |
発表論文
- 森 明慧, 内田 誠一, 倉爪 亮, 谷口 倫一郎, 長谷川 勉, 論理判定型DPマッチングによる類似区間検出, 電子情報通信学会論文誌, Vol.J90-D, No.8, pp.2147-2156, (2007.8)
- 森 明慧,内田誠一,倉爪 亮,谷口倫一郎,長谷川勉,迫江博昭,実体を伴うプロアクティブヒューマンインタフェースのためのジェスチャの早期認識・予測に関する検討,日本ロボット学会論文誌,Vol.24, No.7,pp.954-963,(2006.12)
- Seiichi Uchida, Akihiro Mori, Ryo Kurazume, Rin-ichiro Taniguchi and Tsutomu Hasegawa,Logical DP Matching for Detecting Similar Subsequence, 8th Asian Conference on Computer Vision,November 2007.
- Masato Nakajima, Seiichi Uchida, Akihiro Mori, Ryo Kurazume, Rin-ichiro Taniguchi, Tsutomu Hasegawa, and Hiroaki Sakoe, Motion Prediction Based on Eigen-Gestures, Proc. of the First Korea-Japan Joint Workshop on Pattern Recognition, pp.61-66, 2006.
- Akiriho Mori, Seiichi Uchida, Ryo Kurazume, R.inichiro Taniguchi, Tsutomu Hasegawa, and Hiroaki Sakoe, Early Recognition and Prediction of Gestures toward Intelligent Man-Machine Interfaces, Proc. The Second Joint Workshop on Machine Perception and Robotics, CD-ROM, 2006.
- Ryo Kurazume, Hiroaki Omasa, Seiichi Uchida, Rinichiro Taniguchi,Tsutomu Hasegawa, Embodied Proactive Human Interface ''PICO-2'', Proc. International Conference on Pattern Recognition, B04-0204, Aug 2006.
- Akiriho Mori, Seiichi Uchida, Ryo Kurazume, R.inichiro Taniguchi, Tsutomu Hasegawa, and Hiroaki Sakoe, Early recognition and prediction of gestures, Proc. International Conference on Pattern Recognition, C02-0725, Aug 2006.
- Yutaka Araki, Daisaku Arita, Rinichiro Taniguchi, Seiichi Uchida, Ryo Kurazume and Tsutomu Hasegawa, Construction of symbolic representation from human motion information, 10th Int. Conf. on Knowledge-Based & Intelligent Information & Engineering Systems (KES2006), 2006.
- Rinichiro Taniguchi, Daisaku Arita, Seiichi Uchida, Ryo Kurazume, and Tsutomu Hasegawa, Human action sensing for proactive human interface: Computer vision approach ,Proceedings of International workshop on Processing Sensory Information for Proactive Systems (PSIPS 2004, Oulu, Finland)
- 森 敬充,倉爪 亮,長谷川 勉,村上 剛司,複数カメラによるリアルタイム・モデルベースドモーショントラッキング,日本機械学会ロボティクスメカトロニクス講演会, (2007.5)
- 首藤巧至,諸岡健一,内田誠一,倉爪 亮,原 健二,マルチカメラを用いた行動認識のための識別器構成,第59回電気関係学会九州支部連合大会,10-1A-10,(2006.9)
- 〆野敦稔,内田誠一,倉爪 亮,谷口倫一郎,長谷川 勉,迫江博昭,自己発信される動き情報を利用した移動体の分離および識別,第59回電気関係学会九州支部連合大会,10-1A-11,(2006.9)
- 中島 正登, 森 明慧, 内田 誠一, 倉爪 亮, 谷口 倫一郎, 長谷川 勉, 迫江 博昭,固有ジェスチャを用いた動作予測, 画像の認識理解シンポジウム (MIRU2006), IS2-27, (2006 7)
- 森 明慧, 内田 誠一, 倉爪 亮, 谷口 倫一郎, 長谷川 勉, 迫江 博昭,論理判定型DPマッチングによる類似区間検出とその基本動作抽出への応用, 画像の認識理解シンポジウム (MIRU2006), IS2-4, (2006 7)
- 倉爪 亮,内田誠一,谷口倫一郎,長谷川勉,プロアクティブインターフェースロボット”PICO-2”,第11回ロボティクスシンポジア講演会予稿集,RS036, (2006).
- 倉爪 亮,内田 誠一,谷口 倫一郎,長谷川 勉,プロアクティブヒューマンインターフェースの研究 第3報 予測駆動型アクティブインターフェース実験,第22回日本ロボット学会学術講演会講演予稿集,(2004).
- 中島 正登, 森 明慧, 内田 誠一, 倉爪 亮, 長谷川 勉, 谷口 倫一郎, 迫江博昭, 固有ジェスチャを用いた動作予測モデルの高精度化, 第6回計測自動制御学会システムインテグレーション部門講演会, 3I3-4, 2005 12
- 森 明慧, 内田 誠一, 倉爪 亮, 長谷川 勉, 谷口 倫一郎, 迫江博昭, ネットワークモデルを用いたジェスチャの早期認識・予測に関する検討, 第6回計測自動制御学会システムインテグレーション部門講演会, 3I3-5, 2005 12
- 森 明慧, 内田 誠一, 倉爪 亮, 長谷川 勉, 谷口 倫一郎, 迫江博昭, プロアクティブヒューマンインターフェースの研究 第5報 ジェスチャネットワークの利用による予測駆動の高精度化,第23回日本ロボット学会学術講演会講演予稿集,1H36, (2005 9)
- 大政 紘映,倉爪 亮,田中 俊太郎,長谷川 勉,プロアクティブヒューマンインターフェースの研究 第2報 ヒューマノイド型コミュニケーションロボットPICOの運動制御,第22回日本ロボット学会学術講演会講演予稿集,(2004).
- 内田 誠一,倉爪 亮,谷口 倫一郎,長谷川 勉,迫江 博昭,プロアクティブヒューマンインタフェースのためのジェスチャの早期認識に関する検討,第3回情報科学技術フォーラム FIT講演論文集, (2004).
- 倉爪 亮,内田 誠一,谷口 倫一郎,長谷川 勉,プロアクティブヒューマンインターフェースの研究 ?第1報 人間型アクティブインターフェースの開発?,日本機械学会ロボティクス・メカトロニクス講演会'04講演論文集, 1A1-H-76, (2004).