Morooka Lab: Image information and robotics, Kyushu University

MULTI-FINGERED ROBOT HAND
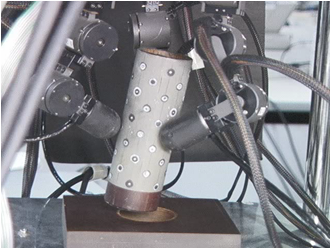
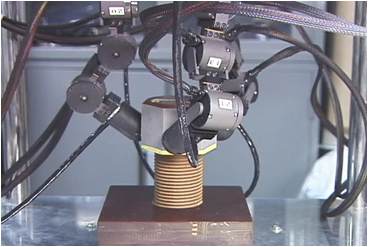
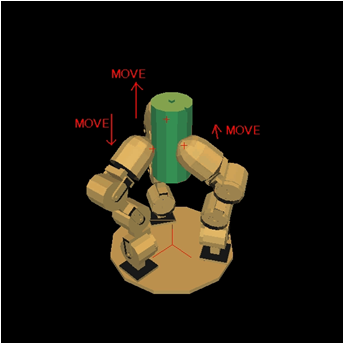
Dexterous Multi-Fingered Robotic Manipulation
人間の手のように多数の関節と指を持つ多関節多指ロボットハンドを用いて,人間のような器用な操作を実現するための研究を行っています.
| Insertion of cylinder | Tighten and loosen a screw |
|---|---|
 |
 |
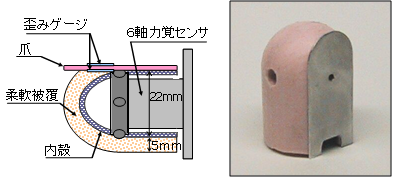
Robot Fingertip Equipped with Soft skin and Hard Nail
人間の指先の皮膚と爪の機能をロボット指先で実現するため,シリコン製の柔軟被覆とアルミ製の爪を持つロボット指先の研究を行っています.
| Robot finger with flexible covering and nail | To turn over a page |
|---|---|
 |
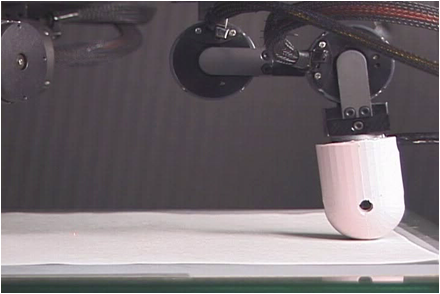 |
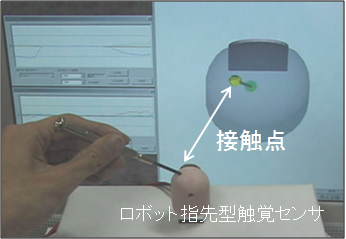
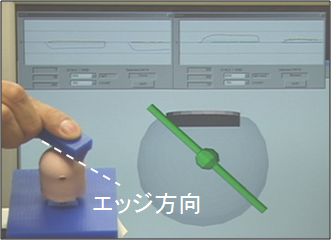
Robot Fingertip Type Tactile Sensor
人間の指先が持つ繊細な触感覚をロボット指先で実現するため,
柔軟ロボット指先と6軸力覚センサを組み合わせたロボット指先型触覚センサの開発を行っています.
| Measurement of contact point | Measurement of edge direction of object |
|---|---|
 |
 |
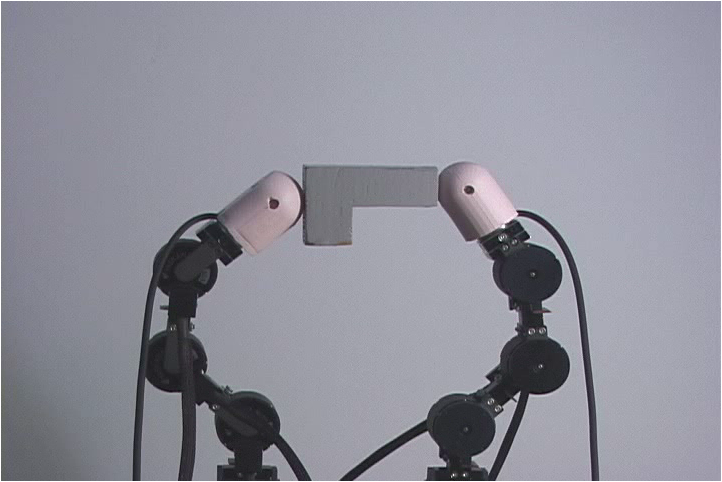
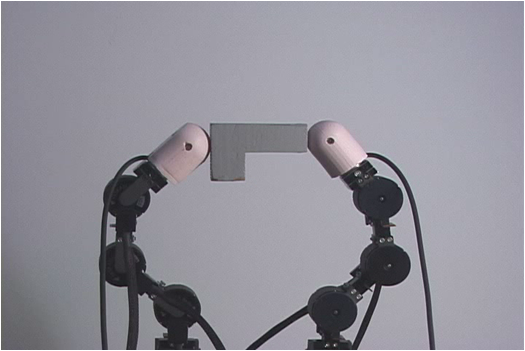
Handling Object by Multiple-Fingered Robot Hand based on Shape of Object
なぞり操作中に物体の端で指先を止めるなど,物体の形状に合わせた物体操作を行うための触覚センシングとハンド動作計画の研究を行っています.
| 物体なぞり操作(操作失敗) | 物体なぞり操作(操作成功) |
|---|---|
 |
 |
| Rotaing a object(failure) | Rotaing a object(success) |
|---|---|
 |
 |
Manipulation Planning of Object by Changing Initial Grasp
多指ロボットハンドで,物体の最初の持ち方をどうすれば指先の滑りなどが起こらずうまく物体操作が行えるかという研究を行っています.
| Handling object by initial grasp 1(failure) | Handling object by initial grasp 2(success) |
|---|---|
 |
 |