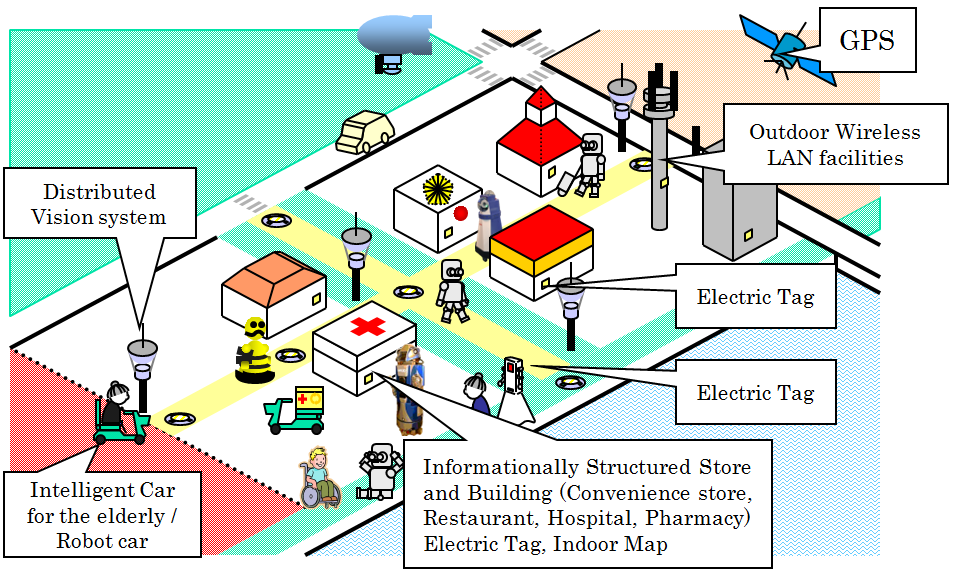
ROBOT TOWN
We are developing a new concept of an intelligent robot working within an ordinary environment for daily human life.
Despite of long history of research on intelligent robot, it has not been possible for a robot to recognize such a complex surrounding situation
using sensors mounted on the robot body.
Therefore, instead of solely relying on the sensors on the robot body,
we are developing an informationally structured environment "Robot Town", where vision,
other sensors and RFID tags are distributed and are connected to the network.
Robot can execute more variable tasks by using environment information of Robot Town (location information, environment map, etc.)
within an ordinary environment for daily human life.
FLATFORM HOUSE
What kind of the house is the best for robot to execute task?
To find that solution, we are developing a Robot House which can give variable information measured by RFID reader,
pressure sensor, and so on are installed on the floor, wall, ceiling, and furniture.
The real-time data from sensors and robots are integrated by a management system together with GIS and other database.
Being provided with the integrated data of dynamically changing surrounding situations, decision and action of the robots will be successfully performed.
| Outside of Robot House |
Indoor of Robot House |

|

|
| Example: A service of Robot in the Robot House (to bring clothes and shoes) |

 |
TRACKING OF EVERYDAY OBJECT
When the robot execute a task, location of all objects on the room is important.
We therefore are developing the sensor system that can track location changed daily objects.
| Tracking of object location |
|
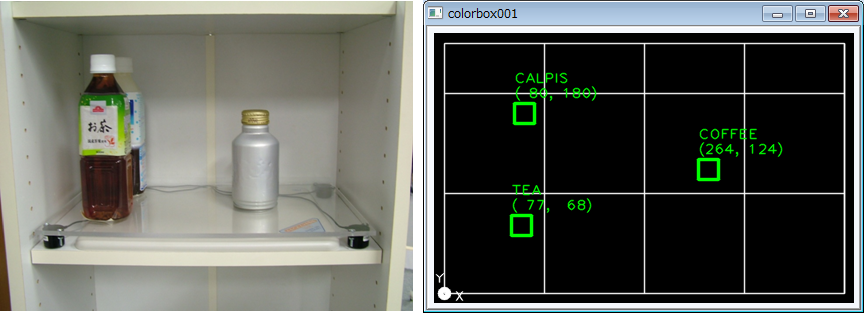
INTELLIGENT CABINET
We are developing an intelligent cabinet which can recognize and localize objects in it.
To design the cabinet, several different sensors are installed in the furniture and cabinet.
| Measurement of incoming and outgoing objects |
|
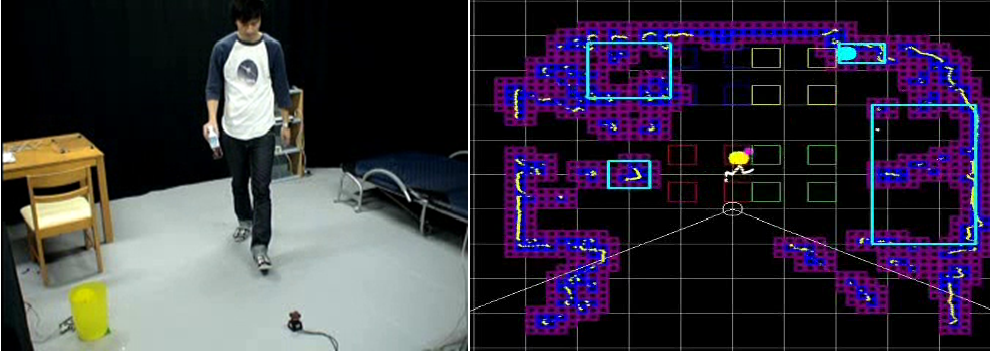
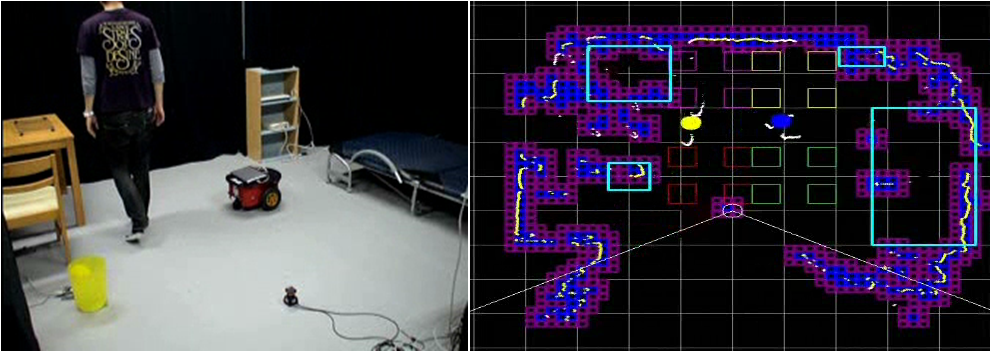
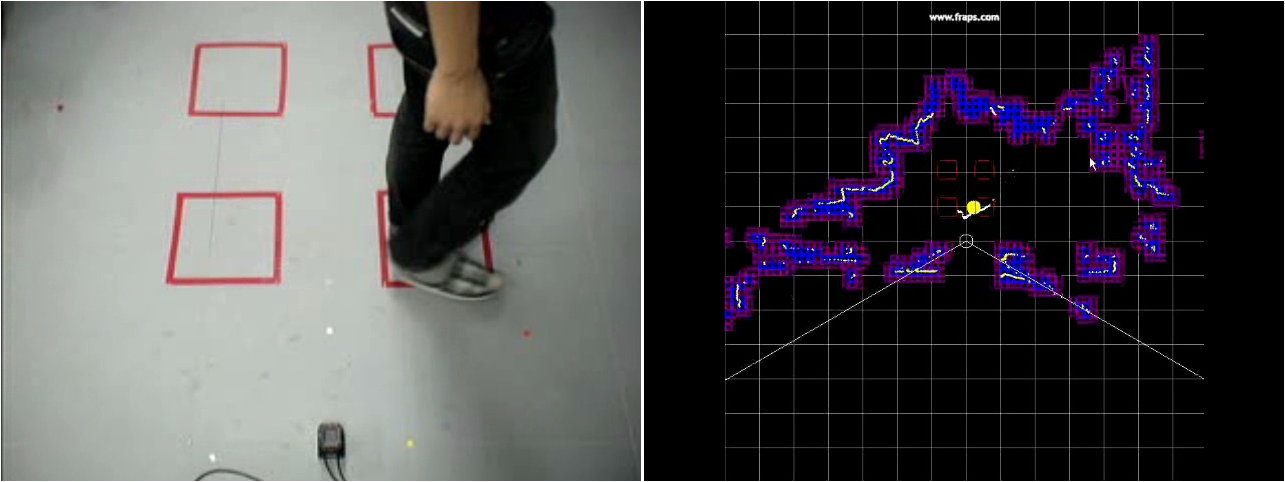
PEOPLE TRACKING USING LASER RANGE FINDEER
We are developing people tracking system which can localize and track people and everyday object on the floor
using Laser Range Finder installed on the floor.
| Example: Tracking of a moving person |
|
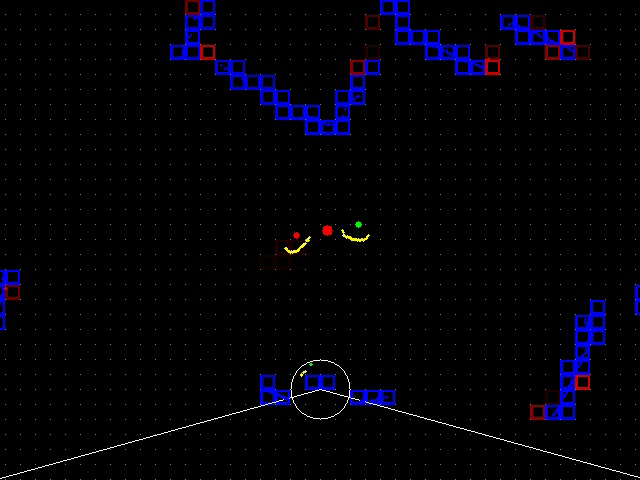
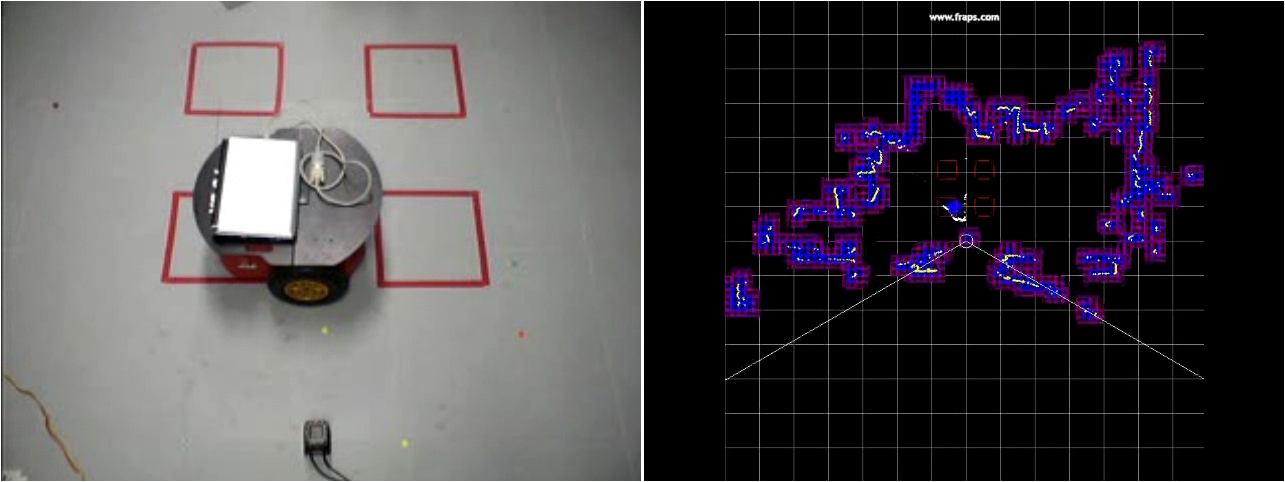
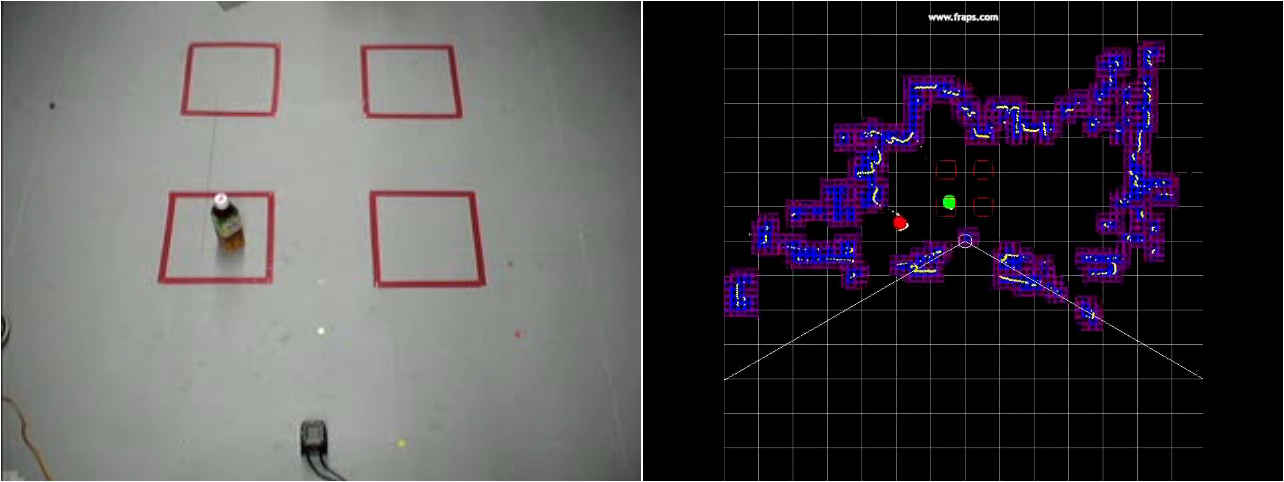
RECOGNITION OF HUMAN, ROBOT, AND DAILY OBJECTS USING PYROELECTRIC SENSOR
We are developing the system which can identify some objects on the floor as human or robot or everyday objects using pyroelectric sensor.
| Identification of human and robot |
|
| Human Identification |
Robot Identification |
Daily Objects Identification |
|
|
|
