九州大学 大学院システム情報科学研究院 諸岡研究室 画像情報ロボティクス

生活支援IRT技術
環境情報構造化
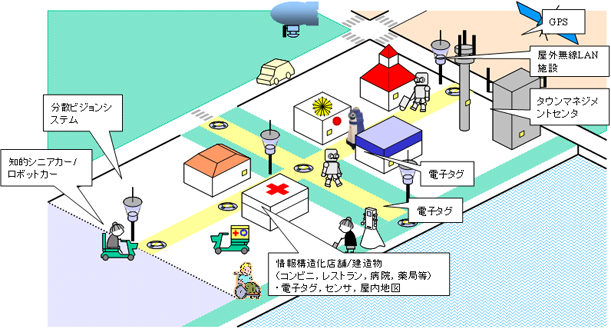
日常生活環境でロボットが人間と共生して働くためには,ロボットに搭載された機能だけで複雑な周囲状況を認識するのではなく, 環境側にセンサネットワークや様々な情報を格納したマーカを配置して,ロボットの作業を支援する仕組みの構築が不可欠です.そこで,この仕組みを実現する環境情報構造化プラットフォームの研究開発を行っています.
環境情報構造化に基づくサービスロボット実現のためのセンサ情報ネットワークの開発
センサ情報による行動認識・予測と,それによる居住者ライフログの生成
ロボットハンド
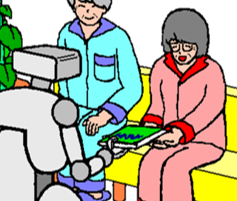
現在日本は超高齢社会であり,介護者の人手不足が問題となっています.そこで,物体の持ち運びや受け渡しなどにより高齢者の生活をサポートするロボットを開発しています.人の生活環境に存在する様々な物体を把持/操作する手法の研究や,ロボットハンドの開発を行っています.