Outdoor Dataset for Place Categorization
SICK Laser
Description
This data consists of panoramic point clouds obtained using a SICK LMS-151 laser scanner on a rotating base. The panoramic point clouds contain depth and reflectance information. The point clouds have a resolution of 3750~3755x760 pixels with a vertical field of view of -85 to 105 degrees, and an horizontal field of view of 360 degrees.


Data format
Each panoramic image is represented using PTS format. Each point contains its 3D-coordinates and the corresponding reflectance value.
A PTS point cloud file contains a header and a body. The body starts in a new line:
header body
PTS point cloud header format. Each row starts in a new line:
number of columns number of rows st1 st2 st3 ; scanner registered position sx1 sx2 sx3 ; scanner registered axis 'X' sy1 sy2 sy3 ; scanner registered axis 'Y' sz1 sz2 sz3 ; scanner registered axis 'Z' r11 r12 r13 0 ; transformation matrix r21 r22 r23 0 ; this is a simple rotation and translation 4x4 matrix r31 r32 r33 0 ; just apply to each point to get the transformed coordinate tr1 tr2 tr3 1 ; use double-precision variables
PTS point cloud body format. Each row starts in a new line:
X1 Y1 Z1 reflectance ; 3D point coordinates and corresponding X2 Y2 Z2 reflectance ; reflectance value in range: 0 - 1 ...
Point Cloud Library (PCL) format
PTS files can be converted into PCD (Point Cloud Library format) format using the following provided software:
ptxrgb2pcd.zip
Place Categories
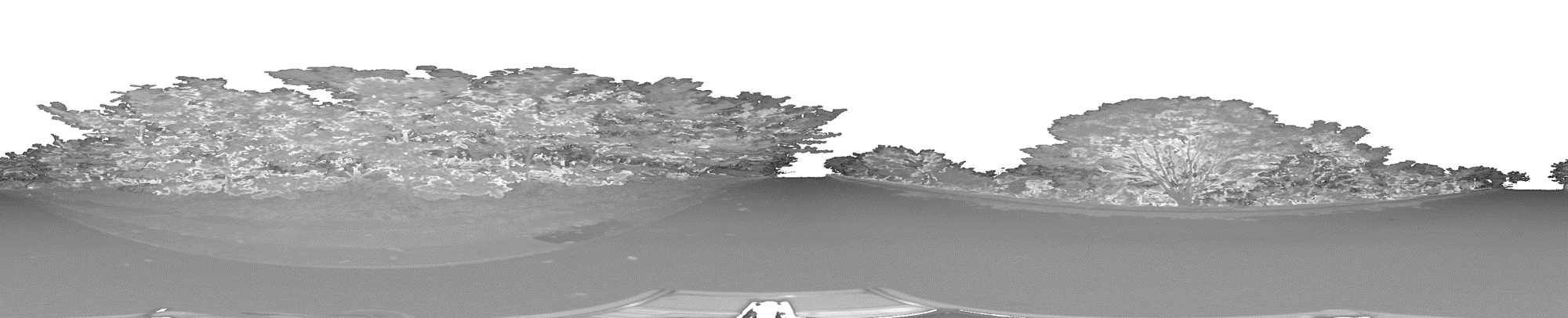
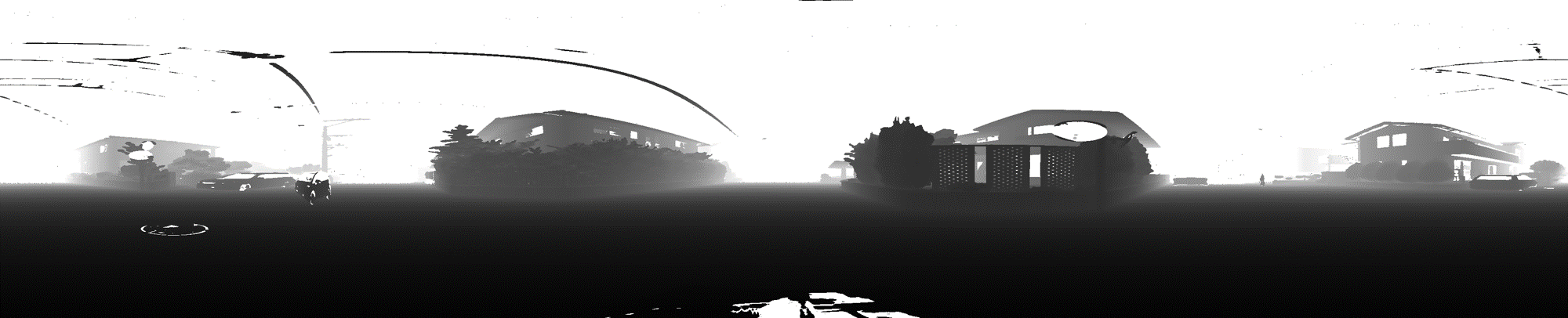
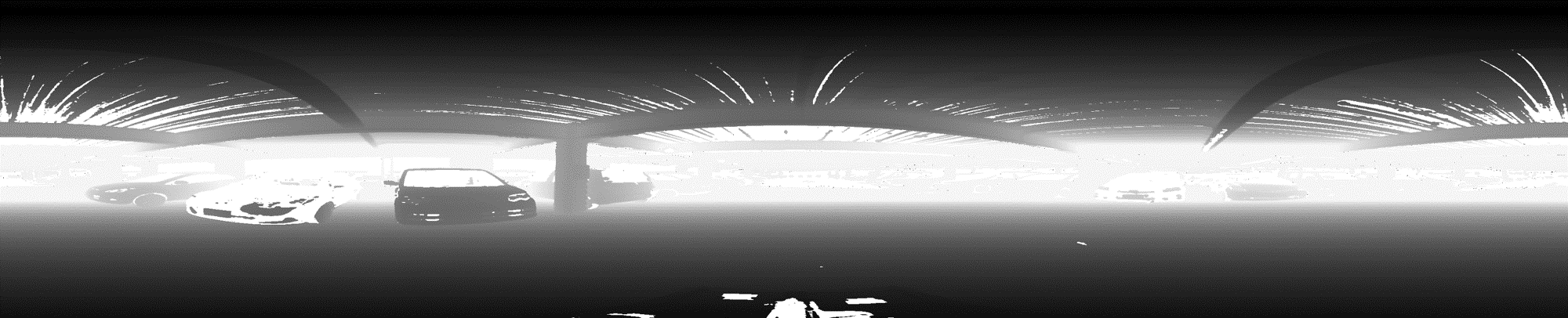
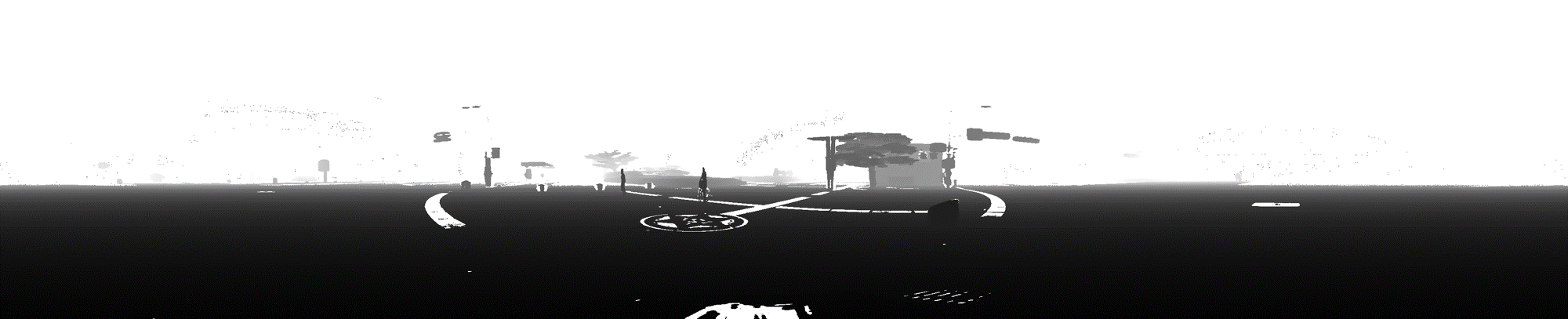
The 3D panoramic scans were obtained at 4 different place categories in Fukuoka city, Japan: forest, redisential area, parking lot, and urban area. Each category contains 7 sets of panoramic images. Each set was obtained in a different place inside the same category. The following table summarizes the data:
| Number of scans | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Place | Set 1 | Set 2 | Set 3 | Set 4 | Set 5 | Set 6 | Set 7 | Total | |
| Forest | 4 | 2 | 3 | 6 | 7 | 6 | 8 | 36 | |
| Residential area | 5 | 5 | 4 | 4 | 13 | 0 | 0 | 31 | |
| Parking lot | 6 | 6 | 8 | 8 | 4 | 0 | 0 | 32 | |
| Urban area | 5 | 5 | 5 | 7 | 8 | 6 | 8 | 44 | |
| Total | 20 | 18 | 20 | 25 | 32 | 12 | 16 | 143 | |
Dataset
The complete dataset is available under request to dbadmin@irvs.ait.kyushu-u.ac.jp.
Data is stored using the following directory and files structure, where names in [brackets] indicate variables:
LRF[Category] # Directory with the category Category | ----- [Category][PlaceId] # Directory containing scans for the category [Category] and set [PlaceId] | | ------- [Category][PlaceId]_[scanId].pts # Scan in PTS format
The following table shows the distribution of the data set. An example is provided for each place category.
| SICK Fukuoka Outdoor Place Dataset | |
|---|---|
| Category |
depth and reflectance example images |
| Forest (695.1 Mbyte, 36 scans) Forest (example) (16.9 Mbyte, 1 scan) |
 |
 |
|
| Residential area (440.4 Mbyte, 31 scans) Residential area (Example) (14.8 Mbyte, 1 scan) |
 |
 |
|
| Parking lot (564.1 Mbyte, 32 scans) Parking lot (Example) (20.3 Mbyte, 1 scan) |
 |
 |
|
| Urban area (641.9 Mbyte, 44 scans) Urban area (Example) (21.5 Mbyte, 1 scan) |
 |
 |
|