Fukuoka Datasets for Place Categorization
Introduction
We present several multimodal 3D datasets for the categorization of places. In addition to 3D depth information, other modalities like RGB or reflectance images are included. The datasets include indoor and outdoor scenarios obtained in different locations in Fukuoka city, Japan. Outdoor place categories include forest, urban area, indoor parking, outdoor parking, coast areas, and residential area. Indoor place categories include corridor, office, lab, study room, kitchen, and laboratory. The set of depth sensors include SICK laser range finders and RGB-D cameras on a mobile platform, and Velodyne and FARO LIDARS on a car.
[Ref.] Oscar Martinez Mozos, Kazuto Nakashima, Hojung Jung, Yumi Iwashita, Ryo Kurazume, Fukuoka Datasets for Place Categorization, International Journal of Robotics Research, 2019 https://doi.org/10.1177/0278364919835603
Outdoor Datasets
Indoor Datasets

Outdoor high density panoramic 3D color point clouds obtained using a FARO 3D laser sensor and a camera on a car.

Indoor panoramic 3D point clouds with high density obtained using a static SICK laser scanner.
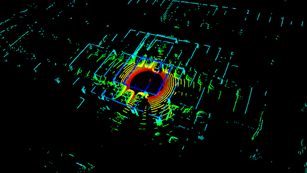
Outdoor panoramic 3D point clouds with low density obtained using a Velodyne sensor on a car.


Outdoor Panoramic 3D point clouds with reflectance data obtained using a static SICK laser scanner.