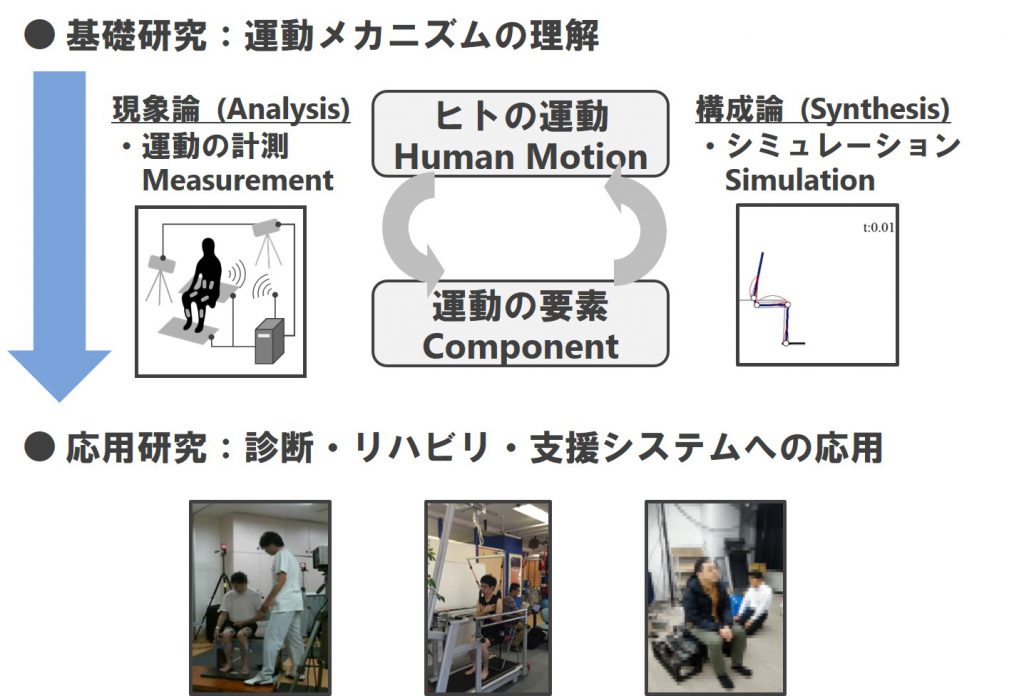
Japan has become a super-aged society with an elderly population of over 25%. The number of motor diseases increases with age, which increases social security costs and burdens on caregivers and physical therapists. I am aiming to research and develop technologies to support people with motor diseases and systems to teach exercise. I am conducting a wide range of researches from basic researches on human motor mechanisms to applied researches on the development of assistive technologies. I am conducting a wide range of research, from basic research on human locomotion mechanisms to applied research on the development of assistive technologies.
Research Equipment
In our research group, we have a complete set of experimental equipment that can be used to analyze human motion and to evaluate and control assistive devices. We mainly use a motion capture system, a floor reaction force meter, and an electromyograph, which can be called the three sacred instruments in biomechanics research.
Optical Motion Capture System
We have an optical motion capture system for measuring human body motion. A total of 11 cameras can be used to measure the motion. By attaching infrared reflective markers to the body, we can measure the 3D position of the markers in space. We also use a motion capture system that requires no calibration. It has blind spots, so it is not a panacea, but it saves the time of calibration. The SDK is also available, so we can provide feedback to the user as they move.


Forceplate
We have three floor reaction force gauges, each of which can measure the floor reaction forces of the left and right feet and buttocks. The force can be measured in six axes (force + moment), and the center of pressure can be determined. The large floor reaction force meter has a vertical capacity of 10,000 N and can measure sports activities such as jumping. A wireless foot sensor is used to measure motions outside of the floor reaction force meter, such as walking.

EMG Sensor
We have two types of wireless electromyographs (Cometa and Delsys). The Cometa electromyograph can measure 32 channels of muscle. The Cometa EMG can measure 32 channels of muscle. 32 channels may sound like a lot, but it is useful for patients with asymmetrical left-right movements such as hemiplegics. It is also used to measure upper limbs and trunk together. When we use all 32 channels, we use up a whole bag of electrodes… We are in the process of increasing the number of Delsys electromyographs. It will be used for a new experimental system. We have up to 48 channels of wireless electromyographs. We also have 16 channels of wired electromyographs. We also have 16 wired electromyographs, which I used in my doctoral course. This is the one I used in my doctoral course, and it has been my go-to when I need more channels.


Research Topic
Elucidation of the muscle synergy structure in the standing movement of healthy young adults (FY 2008-)
In order to improve human locomotion, it is necessary to understand locomotion. In this study, to understand the human standing movement, which is the starting point of daily activities, it is important to measure the movement and analyze it phenomenologically, and to construct a model of the standing movement constructively. In particular, we analyzed muscle activity based on muscle synergy, which is a coherent activity. In particular, a study comparing the synergy of healthy young and elderly people revealed that the muscle synergy corresponding to postural control is weakened in the elderly. In addition, to clarify how humans adaptively generate locomotion to different environments, we measured rising from chairs with different seat heights (external environment) and standing with different locomotion speeds (internal environment). The results showed that although muscle synergies were common across environments, adaptive movements were achieved by varying their activity weights. In a constructivist model of the human musculoskeletal system, it was found that human standing movements could be generated by controlling the three muscle synergies without actually controlling the lower limb muscles individually.
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita and Hajime Asama, “Muscle Synergy Structure using Different Strategies in Human Standing-up Motion”, Advanced Robotics, Vol.31, No.1, January 2017. [pdf][link]
- Qi An, 石川雄己, 舩戸徹郎, 青井伸也, 岡敬之, 山川博司, 山下淳, 淺間一, 座面高と速度の異なるヒト起立動作における筋シナジー解析, 計測自動制御学会論文集, vol. 50, no. 8, pp. 560-568, 2014 (計測自動制御学会論文賞受賞). [pdf][link]
- Qi An, Yusuke Ikemoto, and Hajime Asama, “Synergy Analysis of Sit-to-Stand in Young and Elderly People”, Journal of Robotics and Mechatronics, vol. 25, no. 8, pp. 1038-1049, 2013. [pdf][link] Qi An, Yuki Ishikawa, Shinya Aoi, Tetsuro Funato, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama: “Analysis of Muscle Synergy Contribution on Human Standing-up Motion Using Human Neuro-Musculoskeletal Model”, Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp.5885-5890, Seattle (USA), May 2015. [pdf][link]
Elucidation of muscle synergy structures in standing movements of hemiplegic patients and skill analysis of physical therapists (FY2015-)
This study, conducted in collaboration with Morinomiya Hospital and RIKEN, investigated the identification of muscle synergy structures in hemiplegic patients and how their movements were altered by physical therapist intervention. In hemiplegic patients, the activity of muscle synergy 2, which is responsible for gluteal release, was particularly slow and prolonged. On the other hand, when physical therapists intervened at the hips and knees, the patients were able to stand up more smoothly and the activity of muscle synergy 2 was improved. We plan to apply these findings to the development of a support system in the future.
- Hiroki Kogami, Qi An, Ningjia Yang, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Hajime Asama, Shingo Shimoda, Hiroshi Yamasaki, Matti Itkonen, Fady Alnajjar, Noriaki Hattori, Makoto Kinomoto, Kouji Takahashi, Takanori Fujii, Hironori Otomune and Ichiro Miyai, “Effect of Physical Therapy on Muscle Synergy Structure during Standing-up Motion of Hemiplegic Patients”, IEEE Robotics Automation Letter (Accepted).
- Ningjia Yang, Qi An, Hiroshi Yamakawa, Yusuke Tamura, Atsushi Yamashita, Matti Itkonen, Fady Alnajjar, Shingo Shimoda, Hajime Asama, Noriaki Hattori and Ichiro Miyai, “Clarification of Muscle Synergy Structure During Standing-Up Motion of Healthy Young, Elderly and Post-Stroke Patients”, Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), pp. 19-24, London (UK), July 2017. [pdf][link]
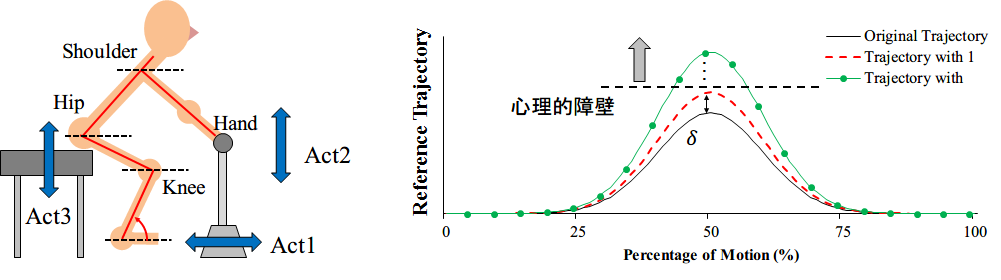
Design of an assistance system based on minimum agnostic difference using self-efficacy (2012)
In order for elderly people to recover their physical functions, they need to overcome psychological barriers and have a sense of self-efficacy that they can accomplish their movements. In the field of rehabilitation, psychological barriers sometimes prevent people from fully exercising their original functions. In this study, we proposed a system that naturally overcomes psychological barriers and gives a sense of self-efficacy by gradually changing the trajectory of the assist device to the extent that the subject does not notice it (minimum knowable difference).
- Qi An, Yuki Ishikawa, Junki Nakagawa, Hiroyuki Oka, Hiroshi Yamakawa, Atsushi Yamashita and Hajime Asama, “Measurement of Just Noticeable Difference of Hip Joint for Implementation of Self-efficacy: In Active and Passive Sensation and Different Speed”, Advanced Robotics, vol. 28, no. 7, pp. 505-515, 2014. [pdf][link]
Motion Teaching System for Rowing Motion of a Boat (2013-2014)
In order to improve the motor skills of unskilled rowers, we developed a system that extracts the differences between skilled and unskilled rowers as motor skills and teaches them. As shown in the video below, we created a system that visualizes the muscle activity during a movement and presents it in real time. This system can be used as a teaching tool by recording the movements of skilled users, or by unskilled users to check their own movements.
- Qi An, 柳井香史朗, 中川純希, 温文, 山川博司, 山下淳, 淺間一, 実映像と筋活動の重畳表示によるローイング動作教育システム, 日本機械学会論文集, Vol.82, No.834, 15-00424, pp.1-11, 2016. [pdf][link]
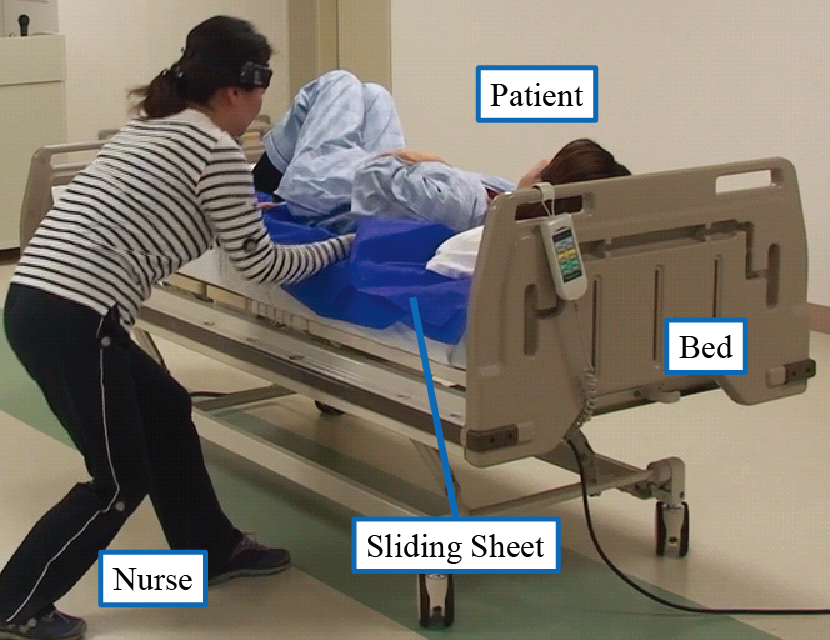
Extraction of skills for nursing care movements using sliding sheets (2013-2014)
Posture change is important for bedridden patients in order to prevent bedsores. In this study, we extracted the skills of a skilled person in pulling a sheet and taught them to an unskilled person. In this study, we extracted the skills of a skilled person when he or she pulls the seat, and examined whether teaching them to a non-skilled person would increase the effectiveness of motor learning.
- 中川純希, Qi An, 石川雄己, 柳井香史朗, 保田淳子, 温文, 山川博司, 山下淳, 淺間一, シートを使ったベッド上介助動作における技能教示サービスシステムの提案, サービス学会第3回国内大会講演論文集, pp. 323-324, 金沢, 2015年4月.
- Junki Nakagawa, Qi An, Yuki Ishikawa, Koshiro Yanai, Wen Wen, Hiroshi Yamakawa, Junko Yasuda, Atsushi Yamashita, and Hajime Asama, “Extraction and Evaluation of Proficiency in Bed Care Motion for Education Service of Nursing Skill”, Proceedings of the 2nd International Conference on Serviceology (ICServ2014), pp. 91-96,Yokohama, Japan, 2014/Sep. [pdf]
Development of a force information feedback system using vibrotactile stimulation for the development of artificial limbs (2011)
Conventional prosthetic hand users are unable to know the force applied to their fingertips when manipulating objects, and are unable to fully utilize their prosthetic hands. In this study, we developed a device that uses vibrotactile feedback to present the force applied to the fingertip to the user in a non-invasive and safe manner through vibration. After two weeks of training, we found that people could learn the force information from the tactile vibration stimuli, and the accuracy of object manipulation was improved. After two weeks of training, people were able to learn enough force information from the vibratory stimuli to perform object manipulation. As a result, the effectiveness of the proposed method was demonstrated by the fact that a single tactile vibration device attached to the arm, which is a very safe and simple method, significantly improved human manipulation of objects.
- Cara, E. Stepp, Qi An, and Yoky Matsuoka, “Repeated Training with Augmentative Vibrotactile Feedback Increases Object Manipulation Performance”, PLoS ONE, 7(2), e32743, 2012. [pdf][link]
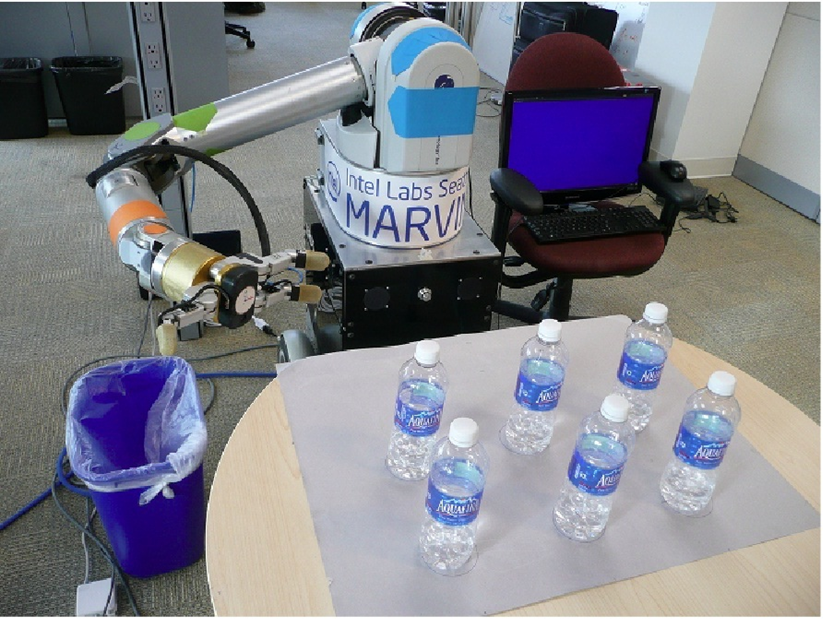
Control of robot manipulators using voice recognition system (2011)
We developed a voice-activated control method for a robot manipulator intended to assist people with limb disabilities, such as paraplegics. We compared the performance of three different control laws: 1. single-joint control, 2. endpoint position control, and 3. multi-joint cooperative control. We compared the performance of three different control laws: 1) grabbing a bottle from a desk and throwing it into a trash can about 0.5 m away, 2) carrying a bag containing six plastic bottles to a desk about 1.0 m away, and 3) standing a collapsed bottle upright. The results showed that the subjects performed significantly better in terms of work time and success rate for single-joint control and multi-joint cooperative control than for endpoint position control.


- Mike Chung, Eric Rombokas, Qi An, Yoky Matsuoka, Jeff Bilmes, “Continuous Vocalization Control Of A Full-Scale Assistive Robot”, Proccedings of IEEE International Conference on Biomedical Robotics and Biomechatronics 2012 (BioRob 2012), pp. 1464-1469, Rome, Italy, 2012/Jun. [pdf]