九州大学 大学院システム情報科学研究院 諸岡研究室 画像情報ロボティクス

環境情報構造化
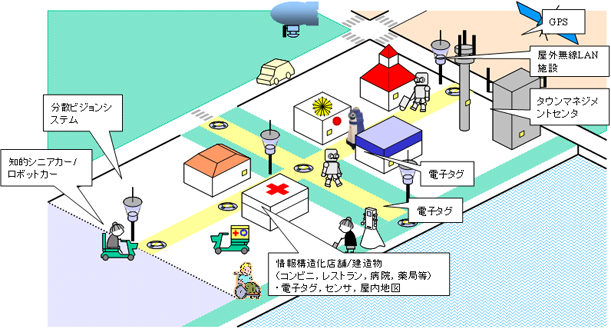
日常生活環境でロボットが人間と共生して働くためには,ロボットに搭載された機能だけで複雑な周囲状況を認識するのではなく, 環境側にセンサネットワークや様々な情報を格納したマーカを配置して,ロボットの作業を支援する仕組みの構築が不可欠です.そこで,この仕組みを実現する環境情報構造化プラットフォームの研究開発を行っています.
タウンマネジメントシステム(TMS)
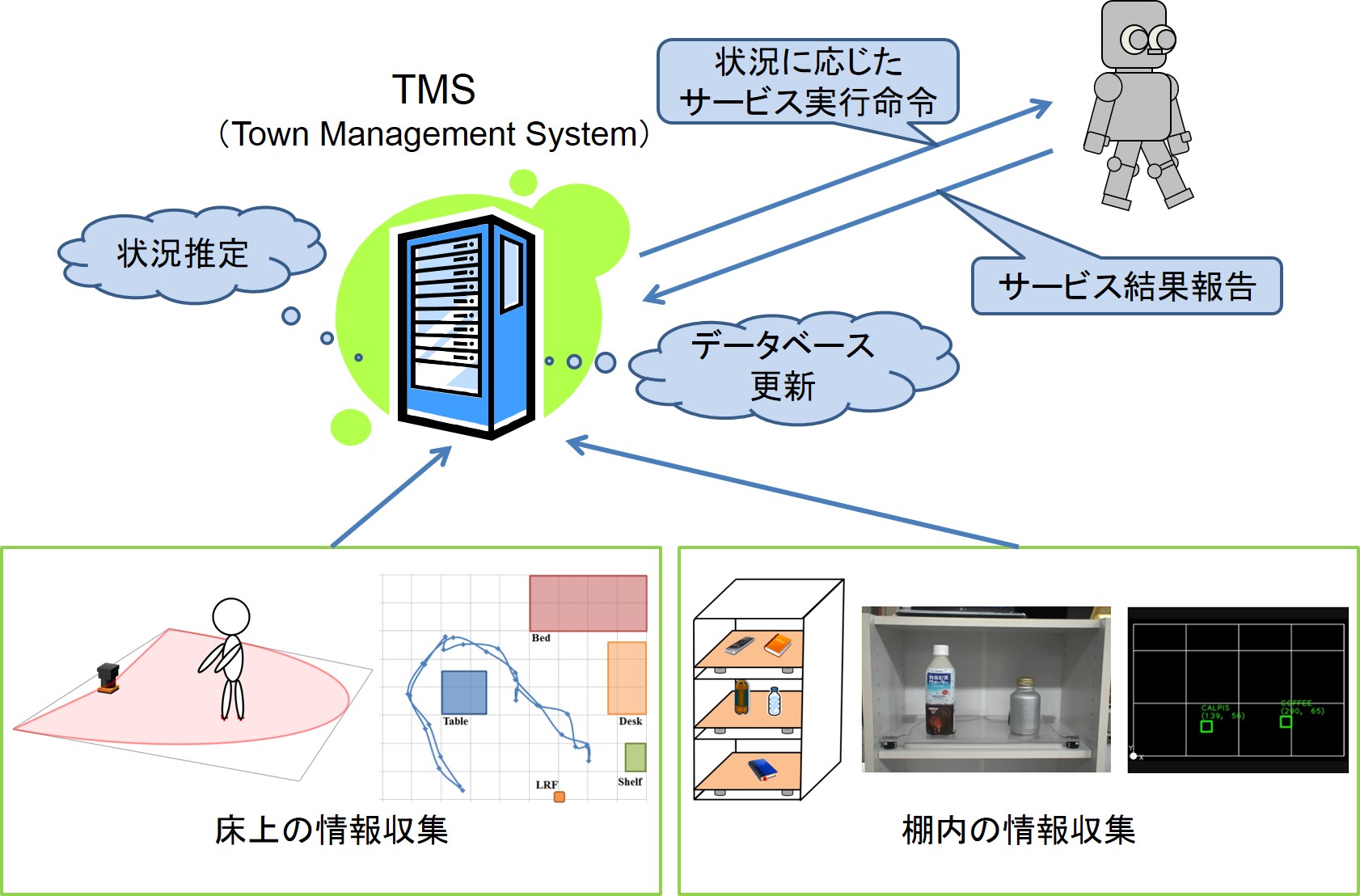
情報構造化環境では,人やロボット,日用品の位置情報などを取得できます.さらに,ロボットが状況に対応して自動的にサービスを実行するためには,収集した情報を解釈し,適切なサービスを選択・実行する必要があります.また,大規模化するシステムに対応するため,センサや処理アルゴリズムをネットワーク化し,目的ごとに構成を組み替えられるものである必要もあります.これらの要件を満たしたTMSアーキテクチャを設計・開発し,実世界で生活支援サービスを提供するための研究を行っています.
環境情報構造化に基づくサービスロボット実現のためのセンサ情報ネットワークの開発
生活支援ロボットの行動動作計画
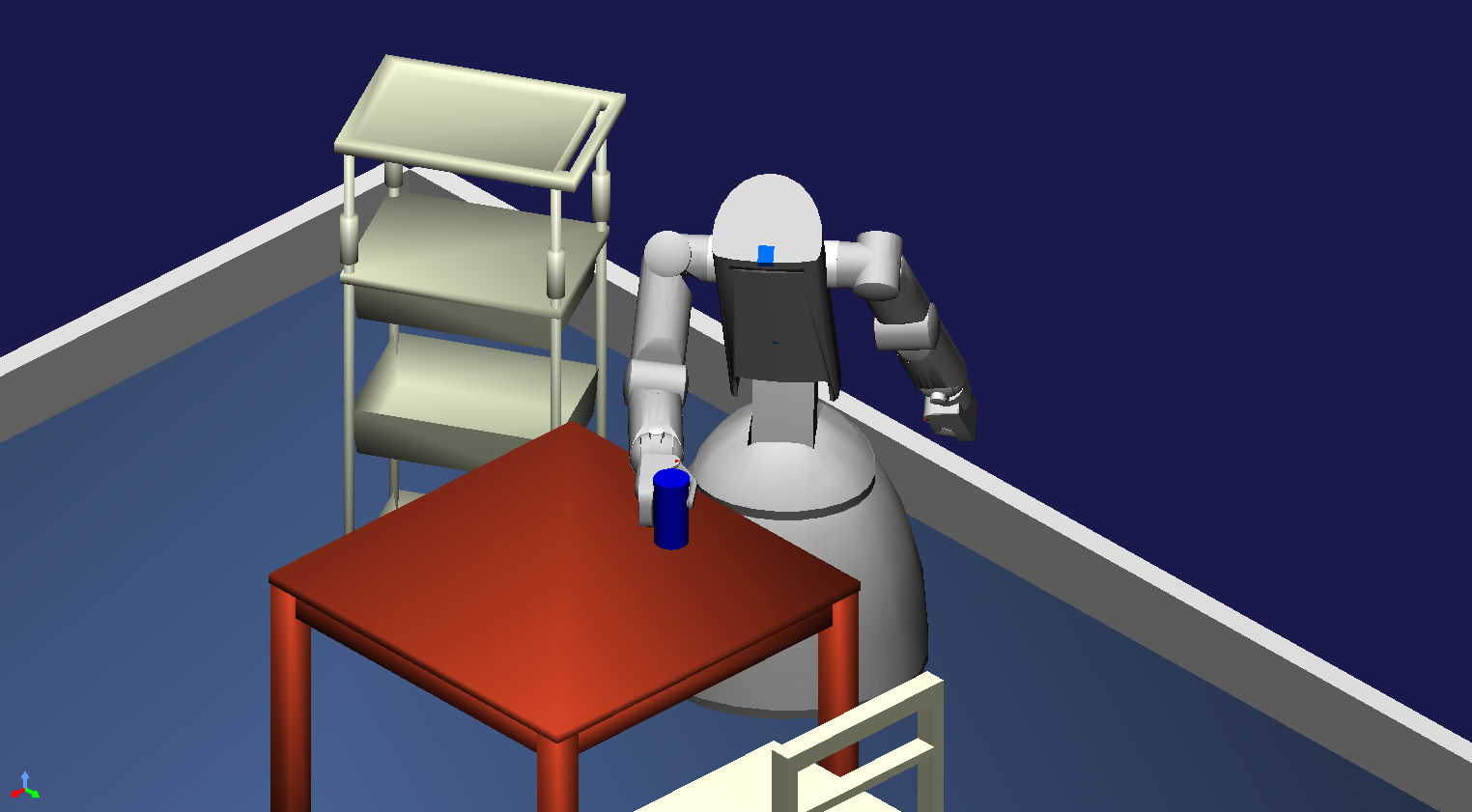
情報構造化された環境において,ワゴンを押して物品運搬を行うための動作計画を行っています.また,人に物品を手渡す位置や,ワゴンを押して移動するための経路の計画を行い,実機で検証を行います.
日用品の位置追跡
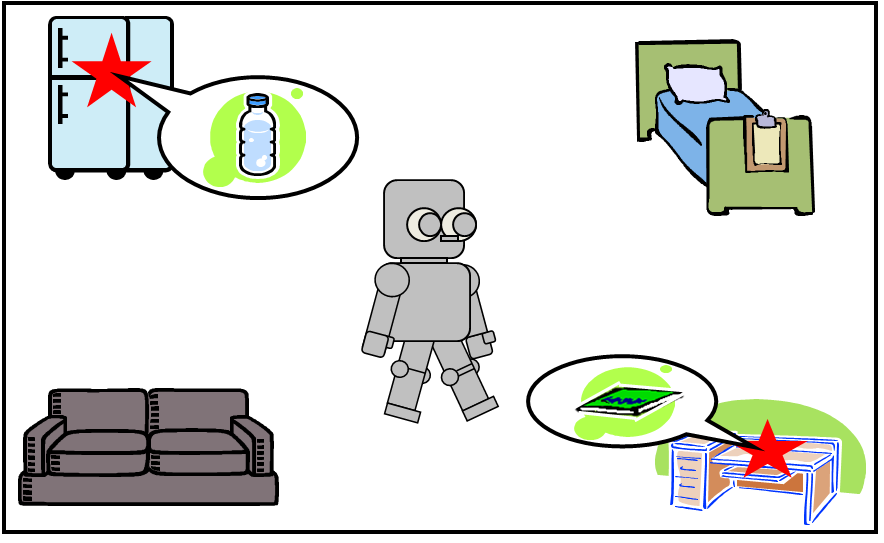
どこに何が入っているのかがわかる知的収納庫を開発しています.複数のセンサを埋め込むことで家具・収納庫を知能化しています.さらに,知能化できていない机やベッドなどの家具上に置かれた物品に関してはロボットに搭載されたカメラで検出します.カメラで計測した現時刻の情景と前時刻の情景との変化箇所から,無くなったあるいは新たに置かれた物品を検出しています.
生活者の位置追跡・行動認識
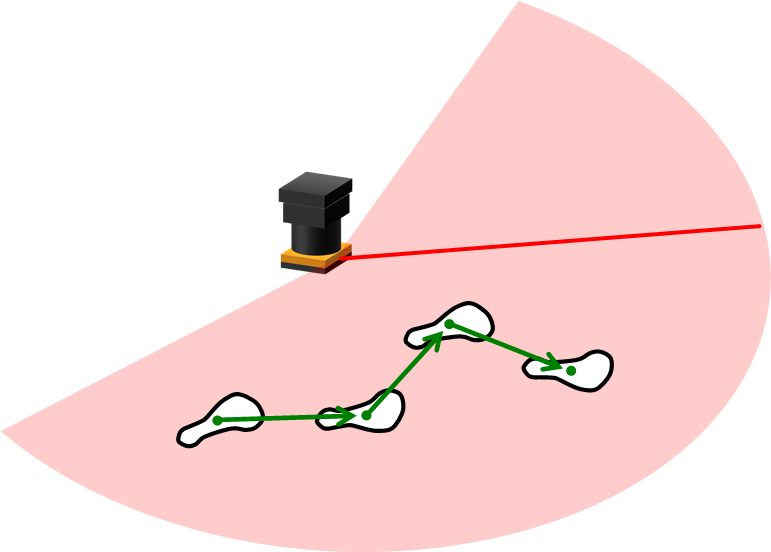
床上に設置したレーザ距離センサを用いて人の足を検出し,歩行軌跡の計測や生活行動の推定を行っています.さらに,これらの情報と,生活者にアクティブRFIDタグ(自ら電波を送信するタグ)を身に付けてもらうことで得られる情報を用いて,複数人物を同時に追跡する研究も行っています.